A Debreceni Egyetem Informatikai Kara 2020. december 15-16-án megrendezte az ADA konferenciasorozat harmadik konferenciáját (ADA 2020), amely az informatika és a STEM területei iránt érdeklődők konferenciája volt.
A konferencia célja
Az ADA konferenciasorozat elsődleges célja, hogy lehetőséget és közeget biztosítson az informatikai és a STEM területeken dolgozó, kutató vagy még a tanulmányaikat folytató nők szakmai megjelenésének, kommunikációjának. A konferencia kiemelt figyelmet kíván fordítani a kapcsolódó szakterületek munkaerő utánpótlásának problémáira, az érdeklődők pályaválasztási motivációja növelésének, illetve az orientáció kialakításának lehetőségeire. A konferenciasorozat szeretne hozzájárulni a nők arányának növekedéséhez a fenti területekhez tartozó szakmákban és kutatásokban.
Kiknek érdemes részt venni?
Mindenkinek, aki érdeklődik az informatika és a STEM területeinek új eredményei iránt! Minden kutatónak, oktatónak, felsőoktatásban tanuló vagy doktori tanulmányokat folytató hallgatónak, akik tudományos eredményeiket szeretnék bemutatni egy szélesebb szakmai közönség előtt.
Akik az informatikához, a STEM területekhez, illetve ezek oktatásához kapcsolódó munkájuk és tapasztalatuk alapján kialakult jó gyakorlatukat kívánják megosztani a szakmabeliekkel.
Az eseményről
Mindkét nap 1-1 plenáris előadással indult. 11 szekcióban (Számítástudomány, Természettudomány, Okos város és okos otthon, Női tapasztalatok a STEM területén, Nők a tudományban, Virtuális valóság, Virtuális valóság és vizualizáció, Középiskolai oktatás, Új didaktikai irányvonalak, Digitális eszköztár használata, Robotika) zajlott a 40 szekció előadás. A konferencia a Webex online platformon zajlott.
2020-ban előadást tartottam „Koronavírus Java projekt – a tervezés és megvalósítás mérföldkövei” címmel, amely a konferencia Digitális eszköztár használata szekciójába került. Az absztrakt: „Az előadás/cikk egy szoftverfejlesztő OKJ képzésen használt/használható esettanulmányt ismertet. A Java projekt két különböző weboldalról ment adatokat, ezek: https://koronavirus.gov.hu/elhunytak és https://www.worldometers.info/coronavirus/country/hungary/. Az adatokat helyi állományrendszerben tárolja, konvertálja, összefésüli, végül némi adattisztítást követően feldolgozza. A Java alkalmazások gyakorlat tantárgy tematikájának kapcsolódó elemei: OOP-MVC, swing GUI, eseményvezérelt programozás, szövegfájlok kezelése, hálózati kommunikáció, kivételkezelés. Az előadás/cikk ismerteti a Java projekt tervezésének és megvalósításának fontosabb lépéseit, mérföldköveit.”
Az előadásom prezentációját és az Java projekt/esettanulmány forráskódját ILIAS e-learning tananyagban tesszük elérhetővé tanfolyamaink résztvevői számára.
A Kutatók éjszakája nemzetközi rendezvénysorozat 2005-ben indult. Magyarország 2006-ban csatlakozott. Azóta évről-évre egyre több intézmény nyitja meg hazánkban kapuit, szervez érdekes programokat, sok-sok településen, több száz helyszínen, több ezer eseményt meghirdetve sok tízezer érdeklődő/résztvevő látogatónak biztosít tartalmas estét.
Bár a kezdeményezés elsősorban a kutatói pálya népszerűsítését szolgálja, ezért leginkább a tizen- és huszonévesekre számít, az események vonzók és elég érdekesek ahhoz, hogy a kisgyerekektől a legidősebbekig mindenki megtalálja a számára izgalmas programokat. Korábban nagyobb felsőoktatási intézmények és kutatóintézetek szerepeltek döntően, de az utóbbi néhány évben egyre több kisebb intézmény, tehetséggondozással foglalkozó középiskola, cég, egyesület is csatlakozott a rendezvényhez. A Kutatók éjszakája rendezvény minden meghirdetett programja ingyenes.
Rendezvényünk plakátja
Az it-tanfolyam.hu 2020-ban is csatlakozott. Három oktatónk hirdetett öt programot a kutatokejszakaja.hu weblapon. Az eseményekre regisztrálni kellett a weblapon, ami talán szervezőként ránk keresve bizonyult legegyszerűbbnek. A regisztrációs időszak november 16-26-ig tartott és a programjainkra november 27-én 17:40-20:50 óráig került sor. Az élő közvetítés linkjét a programra regisztráltak e-mail-ben megkapták. Néhány online látogatónk jelzéséből megtudtuk, hogy ez a folyamat sajnos nem volt zökkenőmentes. Valószínűleg ennek az lehetett az oka, hogy a központi honlap még azután is engedte a regisztrációt a meghirdetett programokra, miután kiküldtük az élő közvetítés linkjét. Tőlük ezúttal is elnézést kérünk.
Terveztük, hogy az előadások élő közvetítését rögzíteni fogjuk és tanfolyamaink hallgatói számára – a kapcsolódó témakörökhöz, ILIAS-ra feltöltve – elérhetővé tesszük. A központi honlap szervezői a rendezvény előtt néhány órával (pénteken 10 órakor) körlevélben értesítettek mindenkit az alábbiak szerint: „Nem készíthetnek és nem tölthetnek fel semmilyen webhelyre vagy fórumra olyan videót vagy felvételt, amelyen a becsatlakozó látogató felismerhető, azaz az arca látszik, neve felismerhető, hangja nevéhez vagy arcához köthető, azaz a személy azonosítható. Ezért rögzíteni bármit csak úgy szabályos, ha erre külön beszerzik a résztvevők hozzájárulását. Amennyiben rögzítésre sor kerülne, felhívjuk a figyelmet arra is, hogy kiskorúak esetében a törvényes képviselőktől is szükséges a hozzájáruló nyilatkozat beszerzése. Hozzájárulás hiányában a felvétel rögzítése, közlése úgy lehet szabályos, ha azon a résztvevők bármilyen technika segítségével felismerhetetlenek, azaz kitakarásra, anonimizálásra kerülnek.” Sajnos erre nem készültünk fel előre és aznap már nem tudtuk megoldani a hozzájáruló nyilatkozatok beszerzését. Ezért az élő közvetítést nem rögzítettük. Ezt kifejezetten sajnáljuk, hiszen sok-sok előkészítő munkát fektettünk bele és a meghirdetett öt programból három teljesen újonnan összeállított anyag volt, egy korábbit frissítettünk és egy pedig igazi örökzöld téma. Természetesen a prezentációkat elérhetővé tettük tanfolyamaink hallgatói számára.
17:40-18:10 – Kaczur Sándor: Szoftverek architekturális tervezésének szempontjai
Az előadás áttekinti, hogyan válasszunk az ismert/tipikus tervezési minták közül és válaszokat ad a következő kérdésekre. Legalábbis megpróbálja. Mekkora a mozgástér a választás során? Mikor jó az MVC? Mikor kell a Factory? Mikor nem jó a Bridge? Mikor hasznos a Chain-of-responsibility? Hogyan csoportosítsuk az igényeinket? Hogyan osszunk szét jól specifikált funkciókat az alkalmazás rétegei között? És vajon mi a teendő kevésbé körültekintő specifikáció esetén? Milyen alapvető modulok állnak rendelkezésre? Minden célszerű ismerni ahhoz, hogy vállalható döntést tudjunk hozni? Hogyan osszunk szét funkciókat a szerver és a kliens oldal között? Mekkora strukturális redundancia kell/hasznos elosztott alkalmazások esetén? Hogyan értékelhető egy szoftver architekturális terve? Lehet két hasonló? Ha igen, melyik lehet a jobb? Ha nem, miért nem? Hogyan kell(ene) dokumentálni egy szoftver architekturális tervét? A program a Java tanfolyamaink orientáló moduljához kötődik.
18:20-18:50 – Kaczur Sándor: Java kollekciók hatékonysága
Adott egy ismert algoritmus egy ismert problémára. A gyakorlati bemutató példákat mutat arra, hogy az ismert Java kollekció keretrendszer különböző adatszerkezeteinek funkcionalitását/szolgáltatásait felhasználva mennyire eltérő megoldásokat tudunk készíteni. Mindegyik megoldás ugyanazt az eredményt adja, de alapjaiban más gondolatmenettel születtek. Vajon melyik tekinthető hatékonyabbnak? Mennyi tárhelyet igényelnek? Mennyi idő alatt hajtódnak végre? Mennyire bonyolultak, azaz mennyire könnyű/nehéz megérteni/dokumentálni/elmagyarázni? Előkerülnek különböző
Set,
Queue,
List,
Map implementációk, programozási tételek. Amit csak lehet, mérünk, összehasonlítunk, elemzünk. Végül az eredmények alapján javaslatokat adunk: mikor, miért, mit (mit ne), hogyan (hogyan ne) használjunk. A program a Java SE szoftverfejlesztő tanfolyamunk tematikájához kötődik.
19:00-19:30 – Kaczur Sándor: Reflexjátékot fejlesztünk
Játékprogramot tervezünk és fejlesztünk, grafikus felülettel. Egy 2×2, 3×3, …, 9×9 négyzetrács alkotja a játékteret, ahol minden négyzet színnel kitöltött. A kitöltés véletlenszerű, de annyiban manipulált, hogy a színek minél különbözőbbek legyenek. A játékmenet során minél gyorsabban ki kell választani a rácsban az egyik négyzetet. Azt, amelyik ugyanolyan színű, mint egy minta. A rács miatt a játék egyre nehezebb. Ez az alapeset, tekintsük ingyenes 1.0-ás verziónak. Ötletelünk a továbbfejlesztési lehetőségek között. Például beépíthetnénk időkorlátot: a teljes játékmenetre globálisat, vagy akár négyzetrácsonként lokálisat is. Csalhatnánk is, akár többféleképpen is. Tűnhetnénk engedékenynek azzal, hogy nem a pontos találatokat számoljuk össze, hanem a hasonló színek is pontot érnek, de arányosan kevesebbet, minél inkább különböznek. Skálázhatjuk a pontszámot, például százalékosan. A megjelenítést GUI kliensprogram végzi, amely a feladatokat a szervertől kapja, amely pontoz is. A program a Java EE szoftverfejlesztő tanfolyamunk tematikájához kötődik.
19:40-20:10 – Szegedi Kristóf: Mihez kezdhetünk a kétszeresen kivételes tanulókkal? Áttekintjük milyen az, amikor találkozik a tehetség és a deficit. Hiszen a természet általában kompenzál. Hogyan vegyük észre? Hogyan éljünk vele (a lehetőséggel)? Hogyan profitáljunk belőle? Milyen soft skillek fedhetik (legalább részben) el a deficitet? Milyen tréningek javasolhatóak? Hogyan bontakoztatható ki a tehetség? Három főbb kategóriát érint az előadás: Asperger-szindróma, ADHD-szindróma, tanulási zavar. Renzulli, Czeizel, Csíkszentmihályi tehetségmodelljeiből kiindulva fokozatosan közelítünk Bagdy Emőke tehetség kibontakozási koncepciójához. Ismertetünk néhány tipikus, atipikus, kritikus és paradigmatikus esetet. Vajon Einstein, Darwin, Michelangelo, Newton, Hitchcook, Cher, Daryl Hannah, Steve Jobs miben volt tehetséges és deficites? Miben különleges a Pokémon Go megalkotója? Előkerül az Esőember, Dr. Murphy és persze Dr. Sheldon Cooper sem maradhat ki.
20:20-20:50 – Kiss Balázs: Gondolkodjunk logikusan!
Az előadás során áttekintjük az intelligencia, a kreatív problémamegoldó és logikus gondolkodás összefüggéseit és izgalmas feladatokból válogatva közösen megoldunk néhány fejtörő feladatot.
A programjaink népszerűek voltak. A Google Meet online platformon kb. 80-an csatlakoztak. A többség több programon is részt vett. Néhányan kifejezetten egy-egy adott program iránt érdeklődtek. Az online platform sokaknak újdonságot jelentett, de azért a chat felületen élénk kérdezz-felelek párbeszéd zajlott. Ahogyan számítottunk rá, markánsan más célközönséget vonzott az első három és az utolsó kettő programunk. Köszönöm oktató kollégáimnak, hogy örömmel csatlakoztak. Külön köszönöm Hollós Gábor kolléga előkészítő tevékenységét, valamint a rendezvény ideje alatt a technikai ügyelet biztosítását. Mindannyian jól éreztük magunkat. Igazán tartalmas esti programot állítottunk össze. Nem akartunk pusztán előre felvett videókat megosztani. Megvolt a varázsa az élő közvetítésnek, hiszen így sokkal személyesebb és interaktív élményt jelentett. Szívesen emlékszünk majd rá. Jövőre talán már az offline világban is szervezhetünk eseményeket, tarthatunk rendezvényeket.
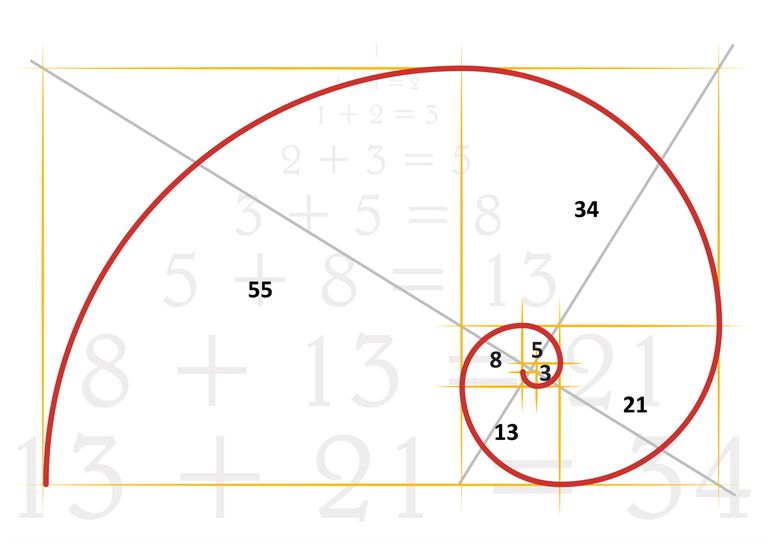
A Fibonacci-spirál a népszerű Fibonacci-sorozat elemei által meghatározott oldalhosszúságú négyzetekbe rajzolt maximális sugarú negyedkörök megfelelően összeillesztett darabjaiból/sorozatából áll. Sokszor hasonlítják az arany spirálhoz (jól közelíti), amely az aranymetszéshez kötődik.
A Fibonacci-spirál
Vegyük a Fibonacci-sorozat első 10 elemét! Rajzoljuk egymás mellé az alábbi elrendezésben belülről kifelé haladva az 1, 1, 2, 3, 5, 8, 13, 21, 34, 55 oldalhosszúságú négyzeteket (az alábbi ábrán vékony sárgával jelölve). Piros színnel rajzoljuk bele a négyzetekbe a négyzet oldalhosszával megegyező sugarú negyedköröket. A negyedkörök megfelelő elrendezésben folytonos görbét alkotnak, és ezt nevezzük Fibonacci-spirálnak (az alábbi ábrán vastag pirossal jelölve).
A rajzolás bármeddig folytatható, mert a sorozat végtelen, a négyzetek illeszkednek és az ábra rekurzív, önhasonló. Az alábbi animáció mutatja, hogyan alakul a spirál a nézőpont közelítésével. A viselkedés távolítás során is azonos lenne.
Korábban blogoltunk már a Fibonacci napról, amelyet minden évben november 23-án ünneplünk. A sorozat első néhány eleméből összeáll a 11.23. és értelmezhető dátumként. Most nem a sorozat elemeinek előállítására fókuszálunk, hanem arra, hogy ezekből felépítsük a Fibonacci-spirált.
Készítsünk Java programot!
Grafikus felületű Java programot készítünk, amely 21 animációs fázisban mutatja be a Fibonacci-sorozat első 10 eleméből álló Fibonacci-spirál felépítését. A rajzolás fázisai:
Az 1. fázis a kiindulópontként tekinthető fehér, üres rajzlap. A rajzlap fekvő, mérete 890*550 pixel, amelyre éppen elfér a 10 negyedkörből álló spirál.
A 2-11. fázisban megfelelő pozícióba/koordinátákra kerülnek fel az ábra vázát alkotó négyzetek, belülről kifelé haladva. A négyzetek oldalainak hosszúsága a sorozat elemeinek megfelelő. A szomszédos négyzetek különböző színekkel kitöltöttek és mindegyikben megjelenik a sorozat megfelelő eleme.
A 12-21. fázisban – szintén belülről kifelé haladva – a négyzetek törlődnek és helyükre a spirált alkotó negyedkörök kerülnek fekete színnel. A 21. fázist tekintjük végeredménynek.
A fázisok kézzel, nyilakkal jelölt (Első, Előző, Következő, Utolsó) vezérlő nyomógombokkal megjeleníthetők, illetve egyben, időzítve animációként is lejátszható a rajzolási folyamat. Az elkészült program működése megfigyelhető az ábrán:
A bejegyzéshez tartozó teljes forráskódot ILIAS e-learning tananyagban tesszük elérhetővé tanfolyamaink résztvevői számára.
A Java SE szoftverfejlesztő tanfolyamunkon, a szakmai modul Objektumorientált programozás témakörét követő 29-36. óra Grafikus felhasználói felület alkalmain már tudunk egyszerűbb szimulációs programot tervezni, kódolni, tesztelni.
Az Európai Programozási Hét idén 2020. október 10-25-ig került megrendezésre. Ez egy önkéntesek által működtetett, alulról szerveződő kezdeményezés. Az önkéntesek saját országukban a Programozási Hét nagyköveteként népszerűsítik a programozást. Ehhez nyílt és ingyenes (online és offline) eseményeket hirdetnek meg a CodeWeek.eu weboldalon.
A Programozási Hét célja
a programozással való alkotás megünneplése,
az emberek felvértezése képességekkel,
az emberek összekapcsolása,
még több ember érdeklődésének felkeltése a tudomány, a technológia, a mérnöki ismeretek és a matematika iránt.
Miért jó ez az érdeklődőknek/résztvevőknek?
A programozás szórakoztató!
Programozni kreatív tevékenység! Az emberiség a kezdetektől fogva alkot: agyagból, kőből, téglából, papírból vagy fából. Manapság programozással is alkotunk.
A programozás felvértez! Sokkal többre is képesek vagyunk annál, hogy csak fogyasszuk a digitális tartalmat; programozással sokféle dolgot alkothatunk, és azokat milliók számára elérhetővé tehetjük. Létrehozhatunk weboldalakat, játékokat, irányíthatunk egy számítógépet vagy egy robotot.
Értsük meg a világot! Manapság egyre több minden össze van kapcsolva. Ha némi rálátásunk van arra, hogy mi történik a színfalak mögött, akkor a világot is jobban megérthetjük.
A programozás megtanítja nekünk a számítógépes gondolkodást, fejleszti a problémamegoldást, kreativitást, kritikus érvelést, analitikus gondolkodást, valamint csapatmunkára késztet.
Manapság a munkahelyek 90%-a digitális készségeket, köztük programozási ismereteket követel a munkavállalóktól.
2015-től veszünk részt az esemény szervezésében, programozást népszerűsítő előadások, laborgyakorlatok meghirdetésével és megtartásával. 2019-ben világszerte 80+ országban 4,2 millió érdeklődő résztvevő csatlakozott.
Meghirdetett eseményeink
2020-ban is három it-tanfolyam.hu-s eseményt hirdettünk meg a Programozási Hét 2020 rendezvényen.
Helyszín: 1056 Budapest, Váci utca 47., 3. emelet 309-es terem, megközelítés
Dátum és időpont: 2020. október 19. 9:00-12:00-ig
Az események ingyenesek voltak, de a részvétel előzetes regisztrációhoz kötött.
Rendezvényünk plakátja
A rendezvény jó hangulatban telt, összesen 34-en látogattak el hozzánk. Sokféle motivációval érkeztek: kíváncsiság, pályaorientáció, első szakma, karrierváltás. Általános lelkesedést tapasztaltunk a lottószelvényes problémák megbeszélése során. Igazán tartalmasan telt el idén is ez a három óra. Köszönjük mindenkinek, aki részt vett a Programozási hét 2020 – CodeWeek.eu rendezvényünkön. Az előadások prezentációit tanfolyamaink hallgatói számára – a témához kapcsolódó témakörökhöz, ILIAS-ra feltöltve – tesszük elérhetővé.
9:00-10:00 – Kiss Balázs: Generáljunk lottószelvényeket és hasonlítsuk össze megoldásainkat!
Véletlenszám-generátorral lottószelvényeket állítunk elő. Többféle ötletet, módszert, algoritmust, adatszerkezetet, tesztelési módszert összehasonlítva vizsgáljuk, hogy melyik a hatékonyabb lépésszámot, memóriaigényt, bonyolultságot tekintve. Java nyelven implementálunk és az érdeklődők javaslatait is azonnal beépíthetjük a forráskódba. A program a Java SE szoftverfejlesztő tanfolyamunk tematikájához kapcsolódik. Előismeretként feltételezünk némi jártasságot programozási alapismeretek, programozási tételek, ciklusok, metódusok, tömbök témakörökből.
10:00-11:00 – Kaczur Sándor: Érvényes lottószelvényt kaptunk?
Most megfordítjuk az előző logikát. A garantáltan helyes lottószelvény helyett előállítunk valamit, amiről feltételezhetjük, hogy lehet lottószelvény. Egymásra épülő unit teszteket készítünk, hogy valóban lehet-e. Például: kapott a teszt metódus egyáltalán valamit paraméterként? Tömböt kapott paraméterként? Hány elemű tömböt? Mekkora a tömbben lévő legkisebb és legnagyobb elem? Különböző a tömbben minden elem? (Ha nagyon szigorúak vagyunk: növekvő sorrendben vannak a tömbben az elemek?) Ha minden kritérium teljesül, akkor érvényes lottószelvényünk van. Kiegészíthetjük időméréssel is. Megtudjuk, hogyan kapjuk meg azt, hogy az esetek 89%-a helyes ötöslottó szelvény lesz. A program a Java SE szoftverfejlesztő tanfolyamunk tematikájához kapcsolódik. Előismeretként feltételezünk némi jártasságot programozási alapismeretek, programozási tételek, ciklusok, metódusok, tömbök, listák, halmazok, lambda kifejezések témakörökből.
11:00-12:00 – Szegedi Kristóf: Építsünk látványos weboldalt XML fájlból megszerzett adatokból!
XML adatforrásban kapjuk egy cég alkalmazottainak adatait, amelyeket Java programmal feldolgozva, látványosan, animálhatóan megjelenítjük böngészőben az eredményt. Például: ki melyik részlegben dolgozik, kik dolgoznak az egyes részlegekben. Az érdeklődők igénye szerint a feladatot megoldhatjuk a következő technológiák közül választva: JavaScript, Bootstrap, jQuery. A Java EE szoftverfejlesztő tanfolyamunk tematikájához kötődik a program. Előismeretként feltételezünk némi jártasságot Java fájlkezelés, kivételkezelés, adatfeldolgozás, HTML, JavaScript témakörökből.
„A WITSEC (Women in IT Security) az IT biztonság területén dolgozó nők szakmai közössége, melynek célja ledönteni azon sztereotípiát, miszerint az informatika csak a férfiak területe. A nők is ugyan úgy képesek megállni a helyüket.” – írják a WITSEC -> Bemutatkozás oldalon. Szándékuk nem a nemek harcának erősítése, hanem képességeikkel és tudásukkal szeretnének hozzátenni a tudomány ezen ágához, mindeközben pedig segíteni az új generációt a szakmai közösségbe való beilleszkedésben. A szervezet 2014-es létrehozását követően folyamatosan növekszik, 2018-ban egyesületté alakult. Küldetésükhöz kötődően rendszeresen szerveznek rendezvényeket. 2020-ban erre a Hopin online platformon került sor. Az eseményre előzetesen 270+ fő regisztrált.
Kaczur Sándor oktatónk a 2020. október 15-én tartott 5. WITSEC szakmai nap 2020 konferencián képviselte az it-tanfolyam.hu projektet. A Nők a szoftverfejlesztés területén című 30 perces előadása megtekinthető:
Az előadás összefoglalója olvasható az alábbiakban:
Adatok az it-tanfolyam.hu beiratkozott nő hallgatóinak statisztikájából:
A nők 65%-a budapesti, a többiek főként Pest és a szomszédos megyékben élnek/dolgoznak.
A nők 76%-a 30-44 éves, 57%-a 30-39 éves. Közvetlenül érettségi után még nem jelentkeznek. Első képesítés helyett inkább a karrierváltás szándéka jellemző.
2015-2020-ig a nők 74%-a középfokú végzettséggel, 26%-a felsőfokú végzettséggel rendelkezett/jelentkezett. (Összehasonlítás: a KSH 2016-os országos adatai: a magyar lakosság 33%-a rendelkezik érettségivel és 20%-a felsőfokú végzettséggel.)
ISCED 2011 szerint a nők tanulmányi területei: 16% oktatás, 28% matematika, számítástechnika, egyéb természettudományok, 23% szolgáltatások.
Idegen nyelv ismeret (KER szerint legmagasabb, nyilatkozat): 58% legalább B1/B2 angol, legalább B1/B2 16% német, 22%-nak nincs figyelembe vehető / munkahelyen használható nyelvtudása.
Fő motiváció: 53% munka mellett tanulni, 35% egyéni fejlődés / új területet megismerni, 28% hosszú távú befektetés, 23% piacképes tudást szerezni, 16% gyermek mellett tanulni, 14% külföldre költözés előtt konvertálható tudást szerezni, 11% kiegészítő területet megismerni, 8% sok pénzt keresni (több is választható volt).
Lemorzsolódás 34%, ebből 4% az első alkalom után, 8% az OOP témakör után, 13% végigjárta a tanfolyamot de online vizsgát nem tett.
Elhelyezkedés, sikeres karrierváltás 60%, ebből 28% 0-6 hónapon belül belföldön, 20% 7-12 hónapon belül belföldön, 12% 0-12 hónapon belül külföldön.
Hivatkozott blog bejegyzéseink:
Nemzetközi IT-s nőnap: válogatás a Women in computing gyűjteményből. Olyan nők, akik maradandót alkottak a számítástudomány, a számítástechnika, a számítógép-hálózatok, IT területén. Érdekesség: Frances Allen a megalapítását követő 40. évben első nőként kapta meg a Turing-díjat 2006-ban.
Interjú Görög Ibolyával: az ország protokollszakértőjétől kaptunk hasznos tanácsokat, amelyek állásinterjún kiválóan bevethetők. Ne feledkezzünk meg a NŐ VAGYOK A TANULT EMBER szerepben megközelítésről és persze kihagyhatatlan a KICCSAJ. 😉
Kutatók éjszakája 2018: Fejős Ibolya – aki a Java SE és Java EE szoftverfejlesztő tanfolyamunkon is részt vett – alumni programunkhoz kötődően tartott előadást Karrierváltás után: az első hónapok junior szoftverfejlesztőként egy kisvállalatnál címmel rendezvényünkön.
Ismertetésre került két nő buyer persona, akikre gyakran gondolunk online marketing tevékenységünk során.
A konferencia három virtuális helyszínen zajlott párhuzamosan: expo, stage, sessions. A prezentációs előadások mellett több kerekasztal beszélgetés is zajlott. Örömmel vettünk részt az eseményen, és egyben köszönjük a lehetőséget.
Weboldalunkon cookie-kat (sütiket) használunk, melyek célja, hogy teljesebb szolgáltatást nyújtsunk látogatóink részére. További böngészésével hozzájárul ezek használatához. ElfogadAdatkezelési szabályzat
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.