„A LEGO® Education olyan, tanulást segítő megoldásokat fejleszt, melyek betekintést nyújtanak tudomány és technológia rövid történetébe, miközben a tanulás folyamatát egy élménnyé teszik. A termékeinket úgy terveztük, hogy a kísérletekben résztvevő diákok aktív közreműködésüknek köszönhetően első kézből, saját bőrükön szerzett tapasztalatokkal fejlesszék a szerkezetekkel, azok működésével valamint a programozási technikákkal kapcsolatos ismereteiket.” – írják a H-Didakt Kft. honlapján, a LEGO® MINDSTORMS® Education EV3 terméklapján. Az önálló felfedezés izgalmát így határozzák meg: „A LEGO® Education megoldásai olyan gyakorlati tanulási technikákon alapulnak, melyek segítik a gyerekeket, hogy elsajátítsák a dinamikus tanulás képességét. Ahelyett, hogy egyszerű memorizálásra bátorítana, a diákokat olyan kihívás elé állítja, melyek arra késztetik őket, hogy használják a képzeletüket, javítsák a problémamegoldó készségüket, valamint a másokkal való együttműködésre is késztet. A diákok átélhetik az önálló felfedezés izgalmát, valamit olyan létfontosságú készségekre tehetnek szert, mely jövőbeli sikerük záloga lehet.”
Élményalapú tanulás
A hagyományosnak tekinthető tanítási paradigmákat fokozatosan leváltják az alternatív pedagógia módszerei. A változás okai ismertek: a szakképzés sajátos igényei, a felnőttoktatás terjedése, a tudomány és a technika felgyorsult fejlődése, az informatika és a hírközlés átalakulása. „Az alternatív tanulási stratégiák alapvető célja az, hogy a tanuló ne a passzív „elszenvedője” legyen az ismeretek elsajátításának, hanem aktív tevékenysége (vagy legalábbis annak szimulációja) alapján vonjuk be őt ebbe a folyamatba. Ennek hatására váljék számára élményszerűvé az új tudás elsajátítása és belsővé válása is. A fenti cél alapján nevezzük az ilyen módszereket összefoglalóan élményalapú tanulásnak.” Néhány pedagógiai módszer/eszköz a tanulási élmények elérésére: kooperatív tanulás, drámapedagógia, projektmódszer, médiapedagógia, felfedezéses tanulás, számítógépes tanulás.
Kolb négy lépésből álló tapasztalati tanulási ciklust javasolt: tapasztalat, reflexió, általánosítás, alkalmazás. „Minden összetevőben megjelenik a cselekvés, az önálló és az együttes munka. Így az élménypedagógiai alapokon nyugvó tanulási folyamat a cselekvés általi tanulás és fejlődés sajátos változata, multiszenzoros tanítási folyamat. Az élménypedagógia a helyzetek teremtésének nagymestere, ezáltal cselekvésre készteti a résztvevőt, provokál, sikert kínál. A résztvevők/tanulók próbára teszik tudásukat, képességeiket, kreativitásukat. Mindezek által feltárva a fizikai, és pszichikai képességeiket. Az élménypedagógia a személyes élményre, megélésre, tapasztalat-és ismeretszerzésre koncentrál. A saját tapasztalati tanulás lényege az önirányítás”, foglalta össze Molnár Katalin.
Módszertani képzés
2020. szeptember 21-én részt vettem a H-Didakt Kft. LEGO Education módszertani képzés / Robotika Mindstorms EV3 robottal című tanári felkészítésén. A helyszínt a győri Széchenyi Egyetem Apáczai Csere János Kar biztosította, amely saját Lego Robot laborral rendelkezik. A blog bejegyzésben látható fényképek ott készültek.
Megismerkedtünk a LEGO MINDSTORMS Education EV3 szoftver alapfunkcióival. Kaptunk ötleteket arra, hogy a különböző életkorú diákok/tanulók/hallgatók számára milyen projektfeladatok az ideálisak. Bemutatták a hazai és nemzetközi versenyeket, ami a csoportmunkában megvalósuló kooperációt kiegészítendő kiváló megmérettetési lehetőséget jelenthet. Én magam is voltam már zsűritag FLL robotversenyen. Mindannyian átélhettük az élményt: milyen összeépíteni, beállítani egy robotot, elkészíteni majd rátölteni a problémát megoldó szoftvert, kipróbálni, finomhangolást végezni. Informatikatanárként nyilván triviális a szoftver használata és az egész folyamat, de újszerű megközelítésnek éreztem azt, hogy szinte minden tantárgyhoz összeállítható olyan projektfeladat, amelyhez felhasználható a robot. Persze át kell élni az első buktatókat is: például amikor nagyon vártam, hogy ugató vagy nyávogó hangot adjon a robot, ha piros vagy sárga színt érzékel, de ehhez nem ártott volna megfelelően összedugni a kábeleket sem. 😉 A robot programozásához szükséges az alapvető algoritmikus építőkockák és érzékelők ismerete. A többi a kreativitáson múlik, aminek a fejlesztését kiváló oktatóvideók és példatárak is segítik. A sok segédanyag közül kiemelem Kiss Róbert: Robotika feladatgyűjteményét.
Többször is elhangzott, hogy ugyanannak a feladatnak több – különböző szintű – jó/helyes/elfogadható megoldása is lehet/van. Matematika szakos tanárként rögtön a Pólya-féle problémamegoldás lépései jutottak eszembe: megértés, tervezés, megoldás, ellenőrzés.
Például: juttassunk el a robottal a Marsról a Földre szállítmányt!
Ha profi megoldást szeretnék, akkor a robotnak meg kell találnia a csomagot, tolnia kell, kanyarodik vele, tovább tolja, végül megáll. Persze a kereséshez érzékelők és tesztelős ciklus kell, a kanyarodáshoz ciklus induló- és célfeltétellel, a haladáshoz tesztelős ciklus, a megálláshoz célfeltétel. Például kanyarodni akkor kell, amikor a robot előtt „megjelenik az út közepén” a fekete pályán egy ferde fehér csík. Ha csalok, vagy csak egyszerűbben gondolkodom, akkor kezdetben a robot irányba áll, halad előre kb. 40 cm-t, fordul balra kb. 45°-ot, majd halad előre kb. 70 cm-t a célig. Ilyenkor 1-2-3 teszt/finomhangolás során 3 szekvenciával is megoldható a feladat. A fordulás is lehet profin tervezett, kiszámolt, vagy történhet tapasztalati úton is: ha balra kell fordulni, akkor a robot jobb oldali kerekének fél fordulatával lemérhető, hogy az hány fokos elfordulást jelent. Persze számíthat, hogy mekkora ívben kell fordulni: kis ív esetén a robot jobb kereke fordulhat előre felet, miközben a bal kereke is fordul (negyedet, felet), de hátrafelé. Izgalmasnak tűnt.
Rögtön eszembe jutott a Bloom-féle taxonómia négy gondolkodási/műveleti szintje is: ismeret, megértés, alkalmazás és magasabb rendű műveletek (analízis, szintézis, értékelés). Ezekre a szintekre tudatosan hivatkozunk Java SE szoftverfejlesztő tanfolyamunkon is, amikor egy-egy programozási feladatot többféleképpen is megoldunk. Ezeket evolúciós projekteknek tekintjük.
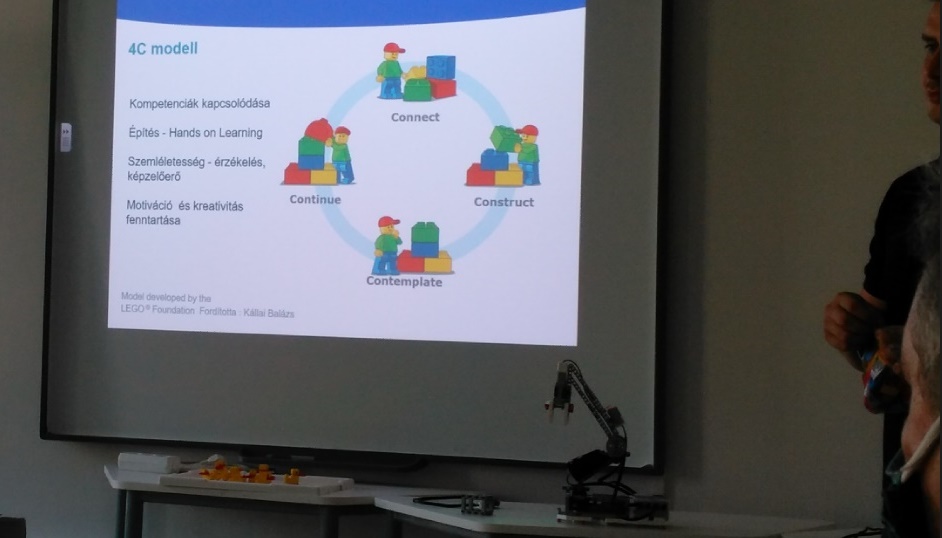
A tanári felkészítést Kállai Balázs Lego tréner tartotta. Biológia szakos tanárként több olyan példát is említett, amelyek interdiszciplináris jellegűek, így jól összefogják például a természettudományos és/vagy STEM alaptantárgyakat, alkalmasak tematikus napok/hetek megvalósítására. Vendégelőadóként Kövecsesné Dr. Gősi Viktória – az SZE oktatási dékánhelyettese – a módszertani és érzékenyítésről szóló részben ismertette A léleknek idő kell című tantárgyának tematikáját. A kollégák abszolút elhivatottak voltak, célorientáltan és bármilyen szakos tanár kollégák számára is közérthetően foglalták össze a gyakorlatban kiválóan használható ötleteiket, tapasztalataikat. A szemléletformáló tanári felkészítést ajánlom az érdeklődő kollégák számára!
Képzeljünk el egy helyzetet, amikor egyik barátunkat, családtagunkat felhívjuk telefonon, és videótelefonálást folytatunk vele, mobiltelefon segítségével egy látványos helyről. A mai technológia segítségével ennek a lehetősége már bárki számára hozzáférhető áron rendelkezésre áll. Ráadásul a kommunikáció szinte tökéletes, láthatóan késleltetés nélküli. Ám tételezzük fel, ha ezt a kommunikációs tevékenységet a Föld két távolabbi pontja között végezzük, mondjuk Magyarországról folytatunk videótelefonálást a 18000 km-re fekvő Új-Zélandra. A helyzet minimális szinten megváltozik, hiszen a nagy távolság következtében a fizikai törvényei itt már emberi léptékben is érzékelhető korlátot szabnak a kommunikáció sebességének. Persze nyugodtan mondhatnánk azt, hogy na és? Joggal, hiszen az átlagember számára fel sem tűnik, hogy az általa halott beszéd, és az általa látott kép a valóságban kevesebb, mint egy másodperc késéssel érkezik meg a küldőtől a fogadóhoz.
Ha ezt elképzeltük, és megvan a 18000 km-nyi távolság és a közel 1 mp-es késleltetés, ugorjunk egy nagyobb léptékre, melynek apropójaként hívjuk fel barátainkat telefonon a Marson. Most csak egy egyszerű példa kedvéért, eltekintve a légköri jelenségektől, a műholdak aktuális helyzetén át, a napszél tevékenységig minden más további hatástól, a Mars-Föld távolság átlagos értékével számolva. Legyünk türelmesek, hiszen a bolygók közti aktuális távolság függvényében, a fénysebesség korlátainak figyelembevételével a késleltetés meglehetősen nagy lesz. Fel fogják venni a telefont. Ne, még ne tegyük le! Igen, tudom, hogy már eltelt tíz perc, de várjunk még! Biztosan fel fogják venni a telefont. És ez a 12. percben meg is történik. A vonal végéről nem hallunk semmit? Nem csoda. Hiszen a mi jelentkezésünk 12 perc alatt ért a Marsra, és újabb 12 percet kell várni arra, hogy meghalljuk barátaink reagálását. Ugye, hogy nem is olyan egyszerű ez a bolygóközi kommunikáció?
Egy kis matematika az előzőekhez:
A Föld-Nap átlagos távolság 8,3 fényperc, ami 149,6 millió km-es távolságot jelent. Ezt alapul véve, és mivel tudjuk, hogy a Föld-Mars átlagos távolság 225 millió km, könnyen kiszámolható, hogy a két bolygó között a fény fotonjai 12,48 perc alatt teszik meg az utat. Tehát jelen technológiákkal (a két bolygó átlagos távolsága esetében) 12,48 perc alatt lehet adatot továbbítani a két égitest között. Érdekesség, hogy 2003-ban a Mars mindössze 56,3 millió km-re volt a Földtől. Gyors számtan: a távolság 3,12 fényperc. (Legközelebb 2287-ben lesz ilyen alkalom.) Azonban 2005-ben a vörös és kék bolygó mértani távolsága elérte a 402,3 millió km távolságot, azaz a 22 fénypercet. További gondolatébresztőként megemlítendő, hogy minden évben van egy két hetes időablak, amikor a Mars a Nap mögé bújik, ezáltal a kommunikáció teljesen megszakad vörös szomszédunkkal. Ebből aztán kiderül, hogy adott dátumtól függően, a Mars és a Föld között általában 7 és 44 perc között zajlik le egy „kérdés+válasz” jellegű kommunikáció.
A Mentőexpedíció című film
A fenti bevezetőből kiindulva, vegyük górcső alá az Andy Weir 2011-es A marsi című regénye alapján készült 2015-ös Mentőexpedíció című filmet. Aki nem ismerné, annak röviden annyit érdemes tudnia, hogy egy kutatócsoport heves időjárási tevékenység miatt menekülni kényszerül a Marsról. A csapat egy ember híján sikeresen eljut a felszállásra kész űrhajóig, amellyel feljutnak a űrben keringő Hermes anyahajóra. Később a Marson hagyott űrhajósról kiderül, hogy a viharos erejű szelet túlélte, bár ő maga, és űrruhája is megsérült. A következő jelenetekben Mark Watney űrhajós számára realizálódik, hogy egyedül maradt a bolygón, a következő küldetés pedig négy év múlva érkezik. Tehát három fő feladata van:
Egy ember számára lakhatatlan bolygón, a rendelkezésre álló eszközökből biztosítania kell az életben maradásához szükséges feltételeket, mint amilyen az élelem, a víz, és az oxigén. Ez megoldhatónak tűnik, hiszen főhősünk botanikus. Növénytermesztéssel létrehozható egy alacsonyszintű ökológiai körforgás.
Megjegyzés:
Fontos megemlíteni, hogy a marsi talaj a nagy hőingadozások miatt rendkívül porózus, továbbá olyan anyagokat tartalmaz (például földpátok, piroxének, olivinek), amik a vízzel vegyülve az emberi szervezet számára méregként hatnak. Például a marsi por belélegzése során, a tüdőben található nedvességgel érintkezve gáz formájában, vagy a véráramba jutva halált kiváltó vegyületek jöhetnek létre. Ehhez képest Mark, ránézésre több száz kg-nyi marsi talajt a lakrészbe talicskáz, és vizzel öntöz. Az ehhez szükséges vizet, az egyik űreszközben található hidrogén elégetésével nyeri, a marsi talajt pedig emberi végtermékkel trágyázza, miközben a növények oxigént termelnek. Ez filmben jól néz ki, de fent már kifejtettem, hogy a marsi talaj az emberi szervezet számára veszélyes lehet. További kérdést vet fel, hogy az emberi végtermék vajon megfelelő tápanyagokat rejt-e, a burgonya növekedéséhez. Ezen kívül az is kérdés, hogy az a szobányi növény termel-e elegendő oxigént. Mindenesetre főszereplőnk ezen feladatát megoldotta. Természetes, hogy ha minden kihívást figyelembe vettek volna a filmkészítők, akkor vagy nem készül el a film, vagy megválaszolják a NASA, valamint más űr- és bolygókutató vállalatok kérdéseit.
Második feladataként meg kell oldania, hogy a marsjáró roverrel eljusson a 3200 km-es távolságban fekvő Schiaparelli-kráterhez, ahová négy évvel később érkezik a következő küldetés legénysége.
Probléma:
Ez számos problémát vet fel, főleg mert a marsjáró egy feltöltéssel elérhető hatótávolsága csak 35 km, ráadásul a járgány fűtése rögtön elviszi a rendelkezésre álló energia felét. Ezen hátrányok meglehetősen érdekesek annak tükrében, hogy a mai járművek akár 350 km-es távolságot is könnyűszerrel megtesznek, a marsjáró légmentes kialakítása és megfelelő szigetelő anyagok használata révén pedig a fűtésre fordított energia jelentősen csökkenthető. Főleg ha elképzeljük milyen fejlesztések zajlanak le a 2030-as évekig. Tény persze, hogy a laza marsi talajon, egy teherautó méretű, nyolckerekű járművel közlekedni több energiát igényel, mint egy kisebb négy kerekű járművel haladni az aszfaltozott úton, azonban arról se feledkezzünk el, hogy a Mars felszíni tömegvonzása harmada a Föld felszíni tömegvonzásának. Mindenesetre a filmbeli főhősünk a fűtés problematikáját a radioizotópos termoelektromos generátor segítségével oldotta meg, a marsjáró hatótávját pedig egy másik, amúgy megsérült marsjáró akkumulátorainak felhasználásával duplázta meg. Így a mozi szerint 70 km távolságra tud eljutni egyetlen feltöltéssel. Ekkor kipakolja a napelem cellákat, és újratölti az akkumulátorokat.
Továbbá fel kell vennie a kapcsolatot a Földdel. Ez utóbbinak nem lenne akadálya, azonban a vihar tönkretette a kommunikációs berendezéseket, valamint az antennát is. A filmtől elvonatkoztatva egy ilyen eset vélhetően nem történhetne meg, ugyanis a tartalék rendszer rendelkezésre állna (dobozokban földbe ásva, dobozokban bent a lakrészben, vagy bármi más módon, amit a szakemberek alkalmasnak találnak erre a célra). A kommunikáció a Földdel gyakorlatilag életfeltétel. Máskülönben az is igaz, hogy a tartalékrendszerek Marsra szállítása extra költségekkel járna.
A film tartalma, valamint a kialakult problémák ismertetése után merüljünk bele a részletekbe, valamint az érdekes, ismert és még ismeretlen fogalmakba!
A sol fogalma
A történet teljes egésze alatt többször elhangzik egy csillagászati fogalom, ez pedig a sol. A sol tulajdonképpen a szoláris nap rövidítése, azonban használata némi bonyodalmat okoz, hiszen a sol-t, mint mértékegységet a NASA 1976-ban az első Viking űrszonda landolásakor, a marsi napok múlásának mérésére vezette be házi használatra. Jelenleg a sol egy hivatalosan nem elfogadott időegység, azonban általánosan elfogadható, hogy 1 sol esetében 1 szoláris marsi nap hosszáról beszélhetünk.
Kiegészítés:
Noha logikus lenne olyan egyértelműsítő fogalmakat bevezetni, hogy 1 földi sol, vagy 1 marsi sol, ennek ellenére az egyébként sem hivatalos időegységet ne bonyolítsuk tovább! Összehasonlításképpen 1 földi szoláris nap ~24 óra 3,5 percnek, 1 (marsi) sol pedig ~24 óra 39,5 percnek felel meg. Ez azt jelenti, hogy a Marson egy általános értelemben vett nap hossza több, mint fél órával tovább tart. További gondolatébresztő érdekesség, hogy a Földön a szoláris nap ritkán használatos. A Földön a csillagnapot szoktuk használni, ez pedig közel azonos – 0,008 s az eltérés – a Föld tengely körüli megfordulásának idejével, ami ~23 óra 56 perc. A csillagnap során azt figyeljük meg, hogy – a Földről nézve – az égbolton a távoli csillagok, mennyi idő alatt tesznek meg egy teljes fordulatot. A Föld csillagokhoz mért óriási távolsága miatt a Föld Nap körüli pályán történő mozgása egy nap alatt szinte elhanyagolható tényező. A szoláris nap esetében viszont ezzel a tényezővel is számolni kell, hiszen a Föld-Nap távolság rendkívül kicsi. Mialatt a Föld megfordul a saját tengelye körül, a Nap körüli pályán egy másik pozícióba kerül, ez utóbbi pedig már jelentősen befolyásolja a szoláris nap hosszát.
Részecske szinten a Marsig tartó út hossza
A filmben többször is elhangzanak változó utazási adatok arról, hogy mennyi idő alatt lehetséges eljutni a Földről a Marsra, illetve vissza. A jelenlegi technológiákkal ez jellemzően 5 és 10 hónap között változhat, attól függően, hogy éppen milyen a bolygók egymáshoz viszonyított aktuális állása. Az sem mindegy, hogy mekkora energiabefektetéssel szeretnénk elérni a vörös bolygót. Erre a megfelelő indítási ablak 26 havonta alakul ki, ami azt jelenti, ekkor áll rendelkezésre néhány olyan nap, amikor hatékonyan el lehet érni a Marsot. 2018-ban az InSight űrszonda nagyjából 5,5 hónap alatt jutott el a szomszédos égitestre, a kilövéstől a leszállásig számolva.
Részletek:
Itt fontos megemlíteni a Hohmann-pályát, mint pályamódosító görbét. Ennek lényege nagyjából úgy néz ki, hogy a Marsra történő utazás során, a Föld körüli pályát a rakétahajtóművek megfelelő ideig történő begyújtásával elhagyjuk. Ezzel a kör alakú pályát egy elliptikus pályára cseréljük le. A gyorsításnak olyan mértékűnek kell lennie, hogy a Nap körüli marsi pályát elérjük. Amikor ez megtörténik, a rakétahajtóműveket ismét be kell gyújtani annak érdekében, hogy az ellipszis alakú pályáról rá álljunk a Mars keringési pályájára. És itt jön képbe a megfelelő indítási ablak, ugyanis a Földről akkor kell elindulni, amikor az ellipszis pálya csúcspontjára érkezve, a Mars még éppen nem érkezett meg. Fontos tudni, hogy a Mars majdnem kétszer annyi idő alatt kerüli meg a Napot, mint a Föld. Tehát a Mars a külső pályán lassabban halad. Ez azt jelenti, hogy ha kicsúszunk az indítási ablakból, akkor a Mars pályáját elérve, a vörös bolygó már mögöttünk lesz. Így gyakorlatilag hónapokig keringhetünk a Nap körül, miközben nem kevés energiát ölünk bele a lassításba, és számos pályakorrekcióba, hogy a Mars utolérjen minket. Korábbi indulás esetén pedig pont azért kell a több energia, hogy hamarabb elérjük a Marsot, majd a nagy sebesség miatt, a találkozóhoz le is kell lassítani.
Kapcsolatfelvétel a Földdel: a hardver környezet kialakítása
Miután főhősünk realizálta, hogy egyedül maradt a Mars felszínén, és a következő küldetés csak négy évvel később érkezik, elkezd azon töprengeni, hogyan biztosítsa maga számára az életben maradáshoz szükséges feltételeket. Ezeket a fentiekben már ismertettem. Már csak kapcsolatba kellene lépnie a Földdel. Ekkor születik meg Mark fejében az ötlet, hogy felkutassa a Pathfindert, mely a marsjáróval immáron elérhető távolságba került. A Pathfinder űrszonda megtalálása kommunikációs csatornát nyit a NASA felé. Csupán annyit kell tennie, hogy kiássa, és a vélhetően elhasználódott, tönkrement akkumulátor kazettát kicserélje. A Pathfinder űrszonda a Discovery program második küldetésében vett részt 1997-ben. Feladata a légkör elemzése volt, továbbá magával vitte a kis Sojourner rovert is, mely a kövek vizsgálatát végezte. Felmerül a kérdés, hogy a főhős honnan ért ilyen sok mindenhez, hiszen botanikus. Az igazság az, hogy egy Marsra juttatott embernek nagyon sok mindenhez kell értenie. Kicsiben például egy weblap készítő szakembernek nem árt ha a kódolás mellett vannak grafikai ismeretei is. Egy katonai repülőgép pilótájának sem csak a gépet kell tudnia vezetni, de ahhoz is kell értenie, hogyan éljen túl egy ellenséges területre történő lezuhanást. Lényeg, hogy ha az ember egy adott szakterületen dolgozik, akkor a rá váró kihívásokra gyorsan tudjon reagálni. Feltételezhető, hogy a Marsra utazó személyek egy nagyjából 15-25 éves korban lévő, nagy létszámú, de már erősen megszűrt halmazból kerülnek ki, akiknek a kiválasztásuk után még akár 15-20 évnyi tanuláson és fejlődésen kell átesniük, hogy alkalmassá váljanak egy marsi kutató misszióban betölthető szerepre. A NASA jelenleg már futtat ilyen programot.
Magyar vonatkozás a filmben:
A film 48. percének 18. másodpercében, a háttérben lévő polcon egy Rubik-kocka látható.
Kapcsolatfelvétel a Földdel: a megvalósítás
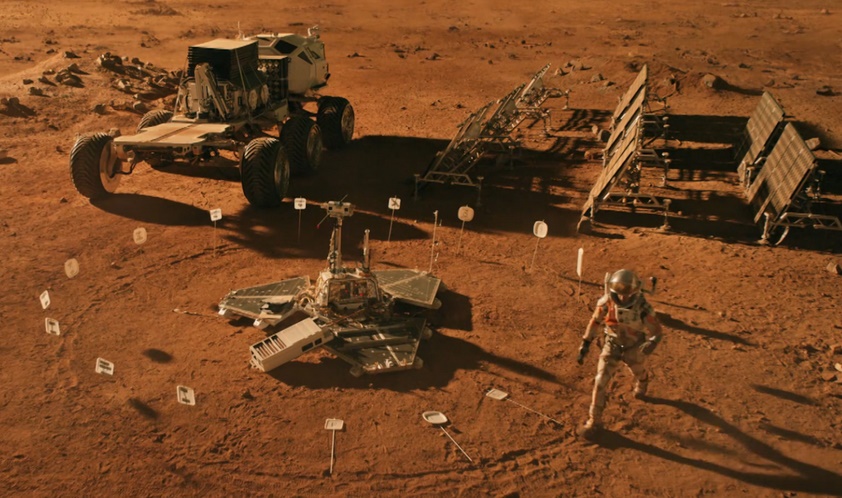
Szóval megvan a Pathfinder, és sikerül működésre bírni. Eközben a NASA a műholdak segítségével felfedezte, hogy az űrhajós életben van, és mozgását folyamatosan követte. Mivel ennek művelete prioritásba került, ezért a NASA a Mars körül keringő műholdak pályáját úgy módosította, hogy az eredeti 41 óránként lezajló 17 perces szünet helyett legfeljebb 4 percig tartson egy szünet. Miután a Földön kiderült, hogy Mark a Pathfinder segítségével szeretné felvenni a kapcsolatot a Földdel, a NASA egyből a JPL-t hívta segítségül. A JPL a Jet Propulsion Laboratory, amit Kármán Tódor alapított, és ő volt az első igazgatója is. Rakétafejlesztő központnak indult, ám napjainkban fő területe a bolygókutató eszközök fejlesztése, és üzemeltetése, így a feljuttatott űreszközök kapcsolati csatornájának végpontján is ők vannak. Az ő termékük többek között a Pathfinder is. A Pathfinder orbitális egység nélkül, közvetlenül kommunikál a Földdel. Ez látható is a filmben akkor, amikor Mark az irányított antennát a Föld felé fordítja. Időközben a Földön a JPL kihozza a raktárból a Pathfinder másolatát, majd a két eszközt szinkronizálja egymással. A marsi szonda üzembe helyezése lehetővé teszi Mark számára, hogy elküldje magáról az első fotót, maga elé tartva egy táblára írt kérdéssel:
„Veszitek az adást?”
A fentiekben már említettem, hogy a Föld-Mars távolság miatt az adatok továbbítása sok időt vesz igénybe, azonban nagyobb probléma, hogy a kamera segítségével Mark ugyan tud hosszú szöveges üzeneteket, kérdéseket fotózott formában továbbítani a Földre, azonban a Pathfinder nem képes arra, hogy a Földről érkezett válaszokat bármilyen formában is megjelenítse. Viszont a JPL képes arra, hogy távolról irányítsa az űrszonda kameráját. Ezt használja ki Mark azzal, hogy első üzenetében egy eldöntendő kérdést tesz fel. Egymástól távol, egy IGEN és egy NEM táblát cövekel le a talajba, ő pedig beállt közéjük, egy harmadik táblával a kezében, amin a kérdés szerepel. A JPL pedig válaszként a kamera fejét a megfelelő tábla irányába fordítja.
A filmből sajnos nem derül ki, hogy a fotót a Pathfinder mi alapján készítette el pont abban a szögben. A fotó valószínűleg automatikusan készült. Ez azt is feltételezi, hogy a Pathfinder folyamatosan készítette a fotókat, és küldte azokat a JPL részére. Ami viszont biztos, hogy az űrszonda rövid idő alatt több fotót is készít, ezeket küldi el a megfelelő paraméterekkel a JPL-nek, a földi vevőegység pedig a képeket panorámaképként összeillesztve jeleníti meg.
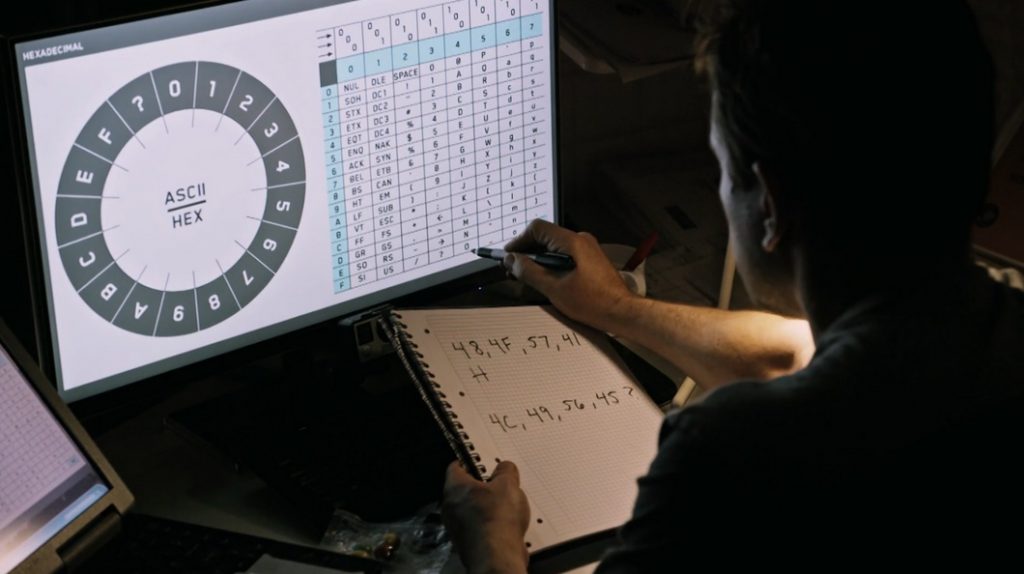
Kapcsolatfelvétel a Földdel: „hexadeci segít a bajban”
A kapcsolatfelvétel sikeressége után a kommunikáció fejlesztése a cél. Ezen nyilván mind a két oldalon dolgoznak, ám első körben főhősünk ötlete lendít egyet az ügyön. Az eldöntendő kérdésekkel a JPL nem tud megfelelő válaszokat adni, hiszen korlátot szab, hogy csak a kamera fejének mozgatásával tudnak üzenetet küldeni. Mark kitalálja, hogy a JPL-nek hexadecimális ASCII kódrendszerben kell válaszolnia a kérdésekre. Ez azt jelenti, hogy a Pathfindert az angol ábécé 26 betűjét, illetve további 10 számjegyet, esetleg írásjeleket tartalmazó táblák helyett csupán 16 táblával kell körbe rakni. Tíz tábla a számjegyeknek, további hat tábla pedig a betűknek A-tól F-ig. Ezzel, valamint az ASCII kódtábla segítségével két hexadecimális helyiértéken 256-féle szimbólum jeleníthető meg, úgy mint az angol ábécé kis- és nagybetűi, számok, írásjelek, illetve jelen esetben kevésbé fontos vezérlőkódok. Így minimális mennyiségű tábla kihelyezésével megfelelő kommunikáció érhető el, hiszen ha túl sok tábla kerülne kihelyezésre, úgy nehezebben lehetne észrevenni, hogy az űrszonda forgatható kamerája melyik tábla irányába néz.
A film ugyan nem mutatja, de feltételezhető, hogy a Pathfinder valamilyen időközönként, talán egy változáskövető/szinkronizáló algoritmus segítségével folyamatosan fotókat küld a JPL részére. Az ottani mérnökök a képek alapján így hamar rájönnek, hogy Mark milyen módszerrel szeretné fejleszteni a kommunikációt. Ennek révén a JPL csapata is ugyanazokkal a táblákkal bástyázza körbe az űrszonda másolatát, majd ennek elkészülte után azonnal el is küldik az első üzenetüket.
Filmbeli baki?
A film 52. percének 12. másodpercében, amikor Mark az első Földről érkezett ASCII üzenetet dekódolja papíron, az ASCII kódok második sorának végén egy kérdőjel látható. A valóságban ott nem kérdőjelnek kellene lennie, hanem 3F-nek. A kérdőjelnek pedig a 3F alatt kellene lennie, ugyanis a „?” ASCII kódja 3F. Az megint egy másik kérdés, hogy amikor a Pathfindert körbe rakja táblákkal, akkor az egyik táblán van egy kérdőjel, illetve a JPL központjában a pizzás dobozra felvázolt terv is számol egy kérdőjel karakterrel. Persze innen nézve nincsen szó bakiról, ám kérdés, hogy vajon miért kellett azt a plusz kérdőjel táblát elhelyezni.
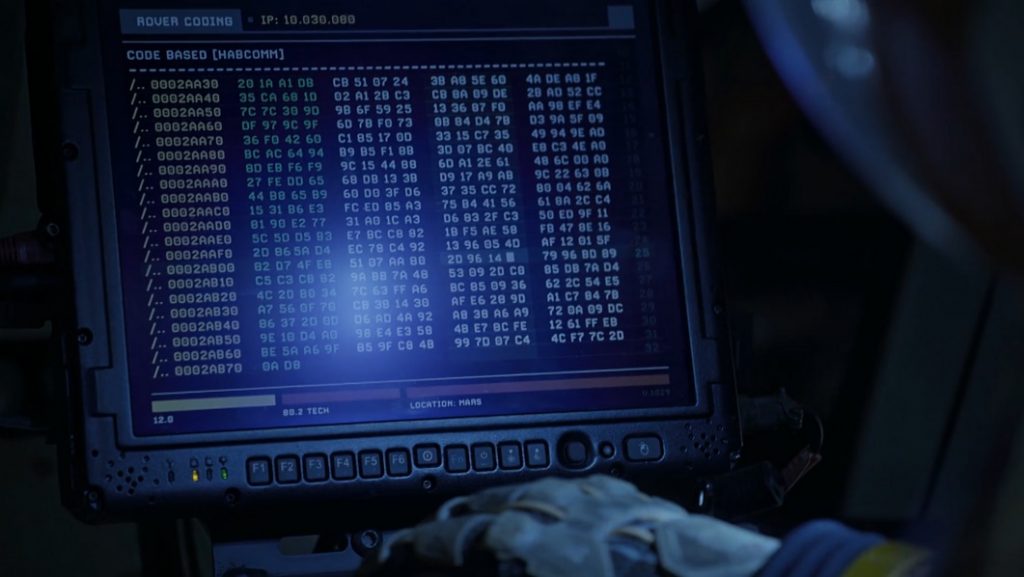
Kapcsolatfelvétel a Földdel: chateljünk a Föld és a Mars között
A kommunikáció újabb szintre emelésének egyik momentuma, amikor a NASA által megadott módon, a marsjáró operációs rendszerét úgy frissítik, hogy az kommunikálni tudjon a Pathfinderrel. Ennek egyik érdekessége, hogy a marsjárót a NASA fejlesztette, a Pathfindert viszont a JPL. Ebből is látható, hogy a szabványok használata mennyire megkönnyíti a rendszerek közti átjárhatóságot, hiszen főhősünknek csupán egy rövid kóddal kell módosítania a marsjáró operációs rendszerét, így az használni tudja az űrszonda rádiófrekvenciáját. (Más kérdés, hogy egy ilyen minialkalmazás miért nincs eleve beépítve a marsjáróba?) Továbbá a rendszer valószínűleg egy egyedi fejlesztésű Linux alapú operációs rendszer, mely úgy került megírásra, hogy az operációs rendszer a marsjáróból is módosítható legyen. További érdekesség, hogy a szoftver módosítása a film 54. percében mutatott képek szerint hexadecimális gépi kóddal történik. Tulajdonképpen a módszer lehetséges, azonban a NASA-nak – a JPL-en át – a hagyományos ASCII kódtáblázat segítségével kell ezt lekommunikálnia, ami egy meglehetősen hosszadalmas folyamat lehet.
Érdekesség még az is, hogy miközben Mark módosítja az operációs rendszert, az életben maradásához szükséges levegőt nem a marsjáróból vételezi, hanem a szkafanderéből. Űrhajós sisakja végig a fején van. Feltételezhető, hogy az operációs rendszer módosítása után egy önellenőrző tesztet is futtatni kell. A rendszer újraindítása a jövőben már nem biztos, hogy feltétel lenne.
Filmbeli baki?
A történetben az hangzik el, hogy az operációs rendszer módosítása után a NASA ráállíthatja a marsjárót a Pathfinder rádiófrekcenciájára. Ez nyilván nem lehetséges, hiszen ahhoz, hogy Mark kommunikálni tudjon a marsjáró segítségével a Földdel, előbb szükség van az űrszonda – mint adattovábbító eszköz – közbeiktatására. Vagyis a NASA nem tud kommunikálni közvetlenül a marsjáróval, így közvetlenül nem is tud segíteni az űrszondával történő összeköttetés létrehozásában. Ellenkező esetben a kapcsolat már korábban élt volna, valamint nem a JPL folytatna kommunikációt az űrhajóssal, hanem a NASA.
A kapcsolat létrejötte után, immáron egy chat felületen zajlik a beszélgetés a JPL és Mark között. Feltételezhető, hogy a marsjáró már eleve rendelkezett valami szöveges üzenetek fogadására és küldésére alkalmas programmal. Innentől már sokkal könnyebb a kommunikáció, bár még mindig nem annyira, mint ahogyan az a filmben látszik. Ahogy nézzük az eseményeket, úgy érezzük, mintha csak a Földön chatelnének egymással. Azonban a valóság még mindig az, hogy egy kérdés-válasz kör 32 percig tart. Tehát, amikor Vincent megkérdezi a JPL-t, hogy a társai hogyan fogadták a hírt életben maradásáról, az üzenet elküldése után legalább 32 percet vár a válaszra. Mivel válasz nem érkezett, ezért egy újabb üzenetet küld el korábbi érdeklődését illetően, melynek a válaszára ismét legalább 32 percet vár. Gondoljunk csak bele, hogy ez mennyire idegtépő lehet, továbbá arról se feledkezzünk meg, hogy még itt a Földön zajló kommunikáció esetében is mennyire egyszerű egymás „szavába” vágni, hát még ilyen késleltetéssel rendelkező üzenetváltás esetén.
Az ellátmány-küldetés
Az első beszélgetések során Mark megtudja, hogy a NASA egy ellátmány-küldetést állít neki össze. Ez annyit jelent, hogy a JPL rohamtempóban megtervez és megépít egy teherszállításra alkalmas űrszondát, melyet eljuttatnak a Marsra. Érdekesség, hogy ekkor a bolygók rossz állása miatt az utazás megtételére kilenc hónap áll rendelkezésre.
Érthetetlen?
Bár az ellátmány-küldetés elkészítését az ideális hat hónap helyett a NASA csupán három hónapra rövidítette, mégsem készült egy probléma esetén azonnal indítható tartalékpéldány. Abban az esetben, amikor egy űrhajós egy idegen bolygó felszínén ragad, és ellátmány-küldetést kell számára eljuttatni, erősen kétséges, hogy a valóságban is csak egyetlen hajóval számolnának. Sokkal valószínűbb, hogy más űrügynökségek segítségét is igénybe vennék, és szükség esetére építenének még egy, vagy kettő redundáns példányt. Annál is inkább mert hasonló eset nem egyszer már a valóságban is megtörtént. Amikor a Nemzetközi Űrállomásra (ISS) indult ellátmány-küldetés, az néhány esetben kudarcba fulladt (2014: Orb-3, 2015: Progressz M–27M, SpaceX CRS-7). Ez azonban nem jelentett veszélyt az űrben tartózkodók életére, mert minden esetben rendelkeznek annyi tartalék élelmiszerrel és más szükséges erőforrásokkal, hogy egy ilyen balul elsült küldetés ne okozzon közvetlen életveszélyt.
A jövő: kvantumkommunikáció
A kommunikáció sebességének felgyorsításán talán épp a modern fizika segíthet a jövőben. A részecskék kvantum-összefonódásának jelensége meglehetősen biztató eredményekkel kecsegtet.
További részletek:
2017 nyarán kínai kutatóknak sikerült adatot továbbítani 1200 km-es távolságba késleltetési idő nélkül. Ez gyakorlatilag a sci-fi történetekben fellelhető teleportálásnak feleltethető meg. Amennyiben ez a mindennapi gyakorlatban is megvalósulna, az szinte olyan lenne az emberiség számára, mint a tűz birtokba vétele, a fémeszközök használatának kezdete, a kerék feltalálása vagy a csavart kötél alkalmazása. Az információ késleltetés nélküli átvitelénél gyorsabb megoldás gyakorlatilag nem létezhet (leszámítva az időben visszaküldött információt, de ez már sokkal mélyebben az elméleti fizika asztala).
A kvantumkommunikáció a kvantum-összefonódás alapjain nyugszik. Ez annyit jelent, hogy egy részecskepár – például foton vagy neutron – két részecskéje között olyan jellegű kapcsolat van, hogy az egyik állapotának megváltozása akkor is hatással van a párjára, amennyiben közöttük több millió fényévnyi távolság van. Tehát ha a részecskepárokat szétválasztjuk egymástól, és két különböző helyre visszük őket, a közöttük fennálló kapcsolat ebben az esetben sem szakad meg. Amennyiben az egyik részecskében változást idézünk elő, arra a másik részecske – függetlenül a távolságtól – azonnal reagál, így az információ átadás azonnali, szám szerint 0 ms.
2019. november 7-én délután látogatást tettem a KUKA Hungária Kft. telephelyén, ami Budapesten, a XI. kerület Dorottya udvarban található. A rendezvényre elsősorban programozáshoz értő fejlesztőket vártak, az már a jelentkezési lapról kiderült, amikor meg kellett adni, hogy milyen programnyelvekhez értek.
Az ott töltött időt három nagyobb részre lehetett osztani. Először a prezentációs bemutatkozások zajlottak, azután a robotok megtekintése, végül pedig egy pizzázással egybekötött kötetlen beszélgetés az előadókkal.
Prezentációk
Először Grósz László R&D vezető bemutatta a céget, és a KUKA cég történelmét. Régóta fennálló céget ismertem meg, melyet 1898-ban alapítottak. Abban az időben acetiléngázt állítottak elő, amivel világítótesteket lehetett működtetni. Nem sokkal később az elektromos világítás megjelenésével és terjedésével a hegesztéstechnikai szektorba helyezték át tevékenységüket, ahol úttörőnek számítottak. Látták az igényt és a lehetőséget a hegesztőgépek automatizálására, így 1956-ban első automata hegesztő gépeik a Volkswagen AG-nál kerültek üzembe. A fejlesztés tovább folytatódott és az első ipari robotjuk, a 6 elektromechanikus meghajtású tengellyel rendelkező Famulus 1973-ban készült el. 1996-ban a KUKA a robotjainak vezérlését PC alapúra cserélte, elsőként az iparágban.
Az ezredforduló után a cég számos további területen jelent meg robotjaival, például az egészségügyben. Az utóbbi évtizedben pedig azon dolgozik, hogy olyan robotokat fejlesszen ki és gyártson (LBR iiwa), amelyek képesek az emberrel együttműködve dolgozni.
Második előadó Komlósi István vezető fejlesztő volt, aki a mobil robotok fejlődéséről beszélt. Napjainkban fontos hívószavak az ipar 4.0 és az okos gyár. Ebbe a paradigmába illeszkedik bele a KUKA a földön mozogni képes, kerekeken mozgó robotjaival. István bemutatott nekünk egy rövidfilmet, ahol a robotok a Boeing gyárban teljesítenek szolgálatot, feladatuk pedig különböző méretű és nagyságú alkatrészek, vagy akár egy fél repülőgéptest szállítása volt.
Mindegyik robot képes volt a saját környezetét érzékelni, mozgás közben előállítani a terület térképét, és elkerülni az útjukba kerülő akadályokat. Ilyen akadályokból többféle is előfordulhatott. Átmeneti akadály, például egy ember vagy másik robot akadályozza a továbbhaladást, ekkor elegendő várakozni amíg az akadály el nem hárul. Állandó akadály, ami olyan új utat elzáró tárgy, ami korábban nem volt jelen, és nem lehet arra számítani, hogy rövid időn belül úja szabaddá válik az út. Ekkor a robotnak ki kell kerülnie az akadályt, ami azt jelenti, hogy az éppen aktuális térképet figyelembe véve új haladási útvonalat kell tervezzen a céljához, majd ezt végre kell hajtania.
A felhő alapú információfeldolgozás a robotikában is utat talált magának: a fejlesztők arra törekszenek, hogy minél inkább felhő alapú legyen a robotok információinak a feldolgozása, ahelyett, hogy magára a robotra kelljen bonyolult és drága információfeldolgozó számítógépeket telepítsenek, így csökkenthető az egyes termékek – amúgy sem csekély – ára. Ahhoz, hogy megvalósulhasson a felhő alapú információfeldolgozás, nagyon alacsony hálózati késleltetésre van szükség, például a napjainkban szárnyait bontogató 5G mobilhálózatra. Itt hangzott el a mesterséges intelligencia szerepe is, amely ipari alkalmazásokat tekintve, csak teljesen biztonságos formában, népszerű hívószóval AI-Safe módon kerülhet alkalmazásra.
Harmadik előadónk Laboda Krisztián volt, csapatvezető és Software Architect. Az ő előadása robotprogramozásról, azon belül is útvonaltervezésről szólt, természetesen csak áttekintő jelleggel. Kezdetben az ipari robotoknak saját, dedikált térre volt szükségük, amelyben mozogni tudtak. Nem voltak képesek érzékelni a környezetüket, de a rájuk bízott és előre megtervezett mozdulatsorokat tetszőleges számban megismételve precízen tudtak dolgozni. A mozgás leírása spline polinomokkal történhet.
Ha mobil robotokban gondolkodunk – ráadásul az emberrel is együttműködni képes robotokban – a probléma az, hogy nem mindig írható le a mozgás teljes pályája, hiszen váratlan események is bekövetkezhetnek a mozgás közben. Ebben az esetben pedig újra kell tervezni a mozgást, amit nyílt hurkú szabályozók használatával érnek el. Így a teljes mozgást kis időszeletekre elosztva, mindig csak a következő időszeletet megtervezve lehetőség van észlelni és reagálni a külvilág felől érkező információkra. A külvilág érzékelése bonyolult művelet, a jelenlegi tudásunk alapján már nem egy gép szenzorjaival dolgoznak az algoritmusok, hanem több gép szenzoradatát összesítve, úgynevezett szenzorfúzióval állítják elő a külvilág modelljét, és ebben a modellben tervezik meg a következő mozdulatot.
Krisztián másik megvilágításból is bemutatta a robotprogramozást. A közönséggel közösen megállapodtunk, hogy a földön élő emberek kb. 0,3%-a tud programozni, és egy-egy robot felprogramozása egy konkrét feladatra – természetesen csak nagy átlagot tekintve – kb. 200 munkaóra. A KUKA-nál azt szeretnék elérni, hogy ennél sokkal többen tudjanak robotot programozni, akár programozói tudás nélkül is, ezért létrehozták az LBR iisy kísérleti platformot.
Ez a robotkar érzékeny az emberi mozdulatokra, ezért képes az együttműködésre, és a Scratch-re megszólalásig hasonlító programozási felületet kapott. A gyártó cég fejlesztői elkészítik az egyes utasítások mögött álló bonyolult kódot, így a felhasználónak már csak az egyes magasszintű utasításokat kell grafikusan összeállítania a kívánt hatás elérésére. Ezt a rendszert nyílttá szeretnék tenni a külső cégek számára, akik eszközöket szeretnének gyártani a robothoz. (Eszköz alatt itt azt értem, hogy a robot „keze” cserélhető, így több feladatra is alkalmas lehet). A külső cégek elkészíthetik az általuk kifejlesztett eszközhöz tartozó programozói könyvtárakat, amit a felhasználó egy fogd és vidd művelettel a robotjához tud rendelni. Az így elkészített programkönyvtárak pedig letölthetőek lesznek egy erre a célra épített alkalmazásboltból.
Utolsó vendég előadónk Dr. Kiss Bálint, a BME Irányítástechnika és Informatika Tanszékének vezetője volt. Ő a mobil robotok fejlesztésének jövőjébe engedett bepillantást. A fejlesztők számára megoldandó feladatok összességét egy mocsárként jellemezte, amelyben vannak könnyű, nehéz és szinte megoldhatatlan feladatok. Ha a fejlesztők meg is oldanak egy-egy feladatot, a következő lépésük a mocsárban egy újabb problémához fogja vezetni őket. Így tekintve nagyon nehéz megmondani, hogy a vágyott végkifejlet mikor is fog elérkezni. Amit mondani lehet, hogy egyes részproblémák megoldásával milyen új alkalmazási lehetőségeink lesznek a közeljövőben.
Kétféle fejlődési irányt lehet megkülönböztetni, ahogyan el lehet jutni a teljesen önállóan működő mobil robothoz. Az első irányzat sokunk számára ismert, gondoljunk csak a mai autóinkra. Egyre többféle vezetést támogató rendszert építenek be a járművekbe, ezzel egyre több feladatot vállal át az autó a vezetőtől. Az ideális állapot az lesz, ha a vezetőnek egyáltalán nem marad majd vezetési teendője. Az ipari robotok esete pont ellentéte ennek. Az ipari robot az első pillanattól kezdve önállóan és biztonságosan kell végrehajtsa a rábízott feladatot, és idővel a robot környezete válik egyre bonyolultabbá, ahogyan egyre nő az igény az alkalmazásának sokféleségére. Először még csak egy elkerített privát térben tevékenykedett, ma már emberek és folyamatosan változó környezetben kell helyt állnia. Probléma, hogy nincs egy egységes szabvány a robotok biztonságos működésére. További probléma, hogy sokféle kihívással találkozhatunk egy mobilis robot fejlesztése kapcsán, ám ezek a kihívások már évtizedek óta léteznek, mint ahogyan a rájuk adott válaszok is.
A különbség a válaszokban az eltelt idő, ugyanis egyre jobb, pontosabb, korszerűbb válaszokat tudunk adni egy-egy kihívásra. Shakey volt az első robot, amely válaszolni kívánt a kihívásokra. 1966-tól 1972-ig fejlesztették és a maga korában egyedülálló volt. Az adott válaszok minőségének javulását többek között ilyen technológiák tették lehetővé: Li-Ion akkumulátor, Lidar, szenzorfúziós becslések, Kálmán-szűrő eljárás, GPU hardver, deep learning.
Végezetül megismerkedhettünk két, a mai kor tudása szerinti válasszal a mobil robot építés kihívásaira. Egy űrben használható robottal, Robonaut 2-vel, ami éppen a nemzetközi űrállomáson tartózkodik, és egy víz alatt használható változattal, Aquanaut-tal.
Robotok megtekintése
Először a robotkarokkal dolgozó fejlesztők laborjában megismerkedtünk az LBR iiwa robotok programozásával, működésével. Placskó András fejlesztő és Schieder Gábor csapatvezető mutatta meg nekünk, milyen egyszerű is egy robotot Scratch-szerű felületen programozni. Tíz-tizenöt parancsból álló kis programmal a robotkar képes volt egy golflabdát megfogni, és egy másik pozícióba áthelyezni. Ehhez természetesen az kellett, hogy ezeket a magasszintű utasításokat előtte a mérnökök elkészítsék. Egy másik robotkaron pedig azt tudtuk kipróbálni, hogy milyen az, amikor az ember együttműködik a robotkarral. Az első bemutató program mozgatta a kart, közben pedig valaki a kezét a kar útjába tette. Alig érintette meg a kar az akadályt, azonnal megállt. Számomra meglepően kis erőket is pontosan tudott érzékelni a robotkar. Másodjára pedig kézzel szabadon mozgathattuk a robotkart és követte az iránymutatásunkat. Így lehetővé vált a „megmutatom a pozíciót”-szerű betanítás, nem csak a vezérlőn keresztüli „addig léptetem, amíg jó helyre nem kerül” fajta.
A robotkarok után továbbmentünk a mobilis robotok laborjába. Itt is két bemutatót nézhettünk meg Baji Bence csapatvezető és Fehér Ágoston csapatvezetők jóvoltából. Ezek a robotok kerekekkel rendelkeztek, így tudtak helyet változtatni. Az első robotra felszereltek egy LBR iiwa kart is, melynek kezében egy kartonlap volt. A kartonlap két felén pedig David Hasselhoff, amint egyszer boldog, egyszer pedig mérges. A robot programja szerint: ha David Hasselhoff jókedvű, akkor a robothoz legközelebbi személy elől megpróbál elmenekülni, ha pedig mérges, akkor a legközelebbi személyt üldözőbe veszi. A két állapot között pedig a robotkart ért külső nyomás váltott. David Hasselhoff mindig a célszemély felé nézett. A fejlesztők elmondták, hogy szerencsénk van, mert ezt a projektet eddig csak a KUKA-s fejlesztőcsapat látta, még nem mutatták be sehol a közönségnek. A program célja pedig az, hogy legyenek olyan látványos és egyszerű alkalmazások, melyeket kiállítások alkalmával be tudnak mutatni, így szemléltetve a robotok képességeit.
A második elkerített részben három „raktáros” robot dolgozott, alágurultak az áruval megrakott polcoknak, kicsit megemelték, és a hátukon vitték a kijelölt új pozícióba. A három robot mozgását egy központi raktár menedzser program koordinálta. A robotok önmaguktól csak arra voltak képesek, hogy a négyzetrácsosan felosztott térben egy téglalappal odébb menjenek, és annak pontosan a közepén megálljanak. A több robot ütközésmentes mozgatását a menedzser program irányította, ami teljesen a budapesti központ fejlesztése.
Számomra az volt a meglepetés, hogy több százszor, vagy ezerszer megemelt, mozgatott és letett polcok pontosan három centiméter távolságban voltak egymáshoz képest. Ilyen pontos pozícionáláshoz elegendő volt mindössze a robotok alján található egy darab kamera, és a padló virtuálisan téglalapokra osztott területén, minden téglalap közepén elhelyezkedő QR-kód-szerű matrica.
Pizza és kötetlen beszélgetés
Az utolsó napirendi pont, a pizza és a beszélgetés következett. Laboda Krisztián mellett találtam helyet, néhány további érdeklődővel együtt. Arról kérdeztük Krisztiánt, hogy milyen feltételei vannak, ha valaki a KUKA-hoz szeretne jönni dolgozni, milyen programozási nyelvet érdemes tudni, milyen tapasztalati szint elegendő egy sikeres felvételihez, hogyan zajlik náluk a felvételi eljárás. Ő azt válaszolta, hogy sokféle programnyelvvel dolgoznak, a C, C++, C#, Java nyelveket biztosan használják, de előfordul náluk a JavaScript, TypeScript is, sőt, néha a Python-ra is szükségük van. Tapasztalati szint szerint a juniortól egészen a csapatvezetőig keresnek munkatársakat, természetesen nem egyszerre mindenfélét, inkább szükség szerint. Egykörös interjúkat szoktak tartani.
Nagyon érdekes délutánt töltöttem el a KUKA Hungary Kft. rendezvényén, ahol látszott, hogy sok vendéget megfogott a téma és az ipari robotos világ. Ha valaki érdeklődne hasonló nyílt napok után, érdemes a KUKA Global oldalt követnie a facebookon, mert várható, hogy a cég félévente újabb fejlesztői délutánokat fog szervezni.
A rendezvény szervezői nem engedélyezték a fényképezést.
Weboldalunkon cookie-kat (sütiket) használunk, melyek célja, hogy teljesebb szolgáltatást nyújtsunk látogatóink részére. További böngészésével hozzájárul ezek használatához. ElfogadAdatkezelési szabályzat
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.

 Kommunikáció a Mars és a Föld között
Kommunikáció a Mars és a Föld között


 Bevezető, avagy a szomszéd messze van
Bevezető, avagy a szomszéd messze van