Címke: ingyenes esemény
33 blog bejegyzésnél szerepel:

![]() Kódolás órája az Óbudai Egyetemen 2023
Kódolás órája az Óbudai Egyetemen 2023
![]() Programozási Hét 2023 – CodeWeek.eu
Programozási Hét 2023 – CodeWeek.eu
 Programozd a jövőd! – IT a jövőd
Programozd a jövőd! – IT a jövőd
![]() Programozási Hét 2022 – CodeWeek.eu
Programozási Hét 2022 – CodeWeek.eu
![]() Programozási Hét 2021 – CodeWeek.eu
Programozási Hét 2021 – CodeWeek.eu
![]() Múzeumok Éjszakája 2021 - Sziklakórház, Bélyegmúzeum
Múzeumok Éjszakája 2021 - Sziklakórház, Bélyegmúzeum
![]() Programozási Hét 2020 – CodeWeek.eu
Programozási Hét 2020 – CodeWeek.eu
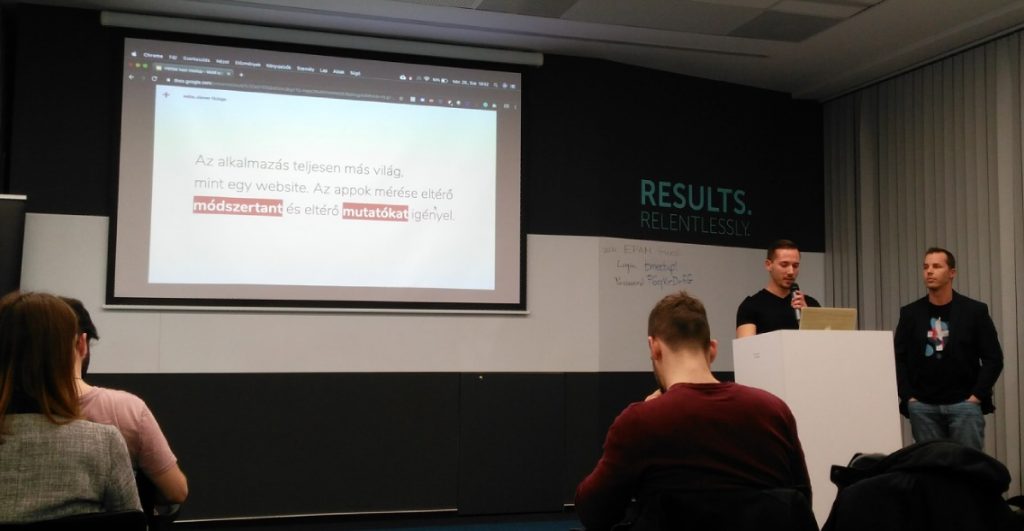
![]() HWSW – Appmenedzsment és marketing meetup
HWSW – Appmenedzsment és marketing meetup
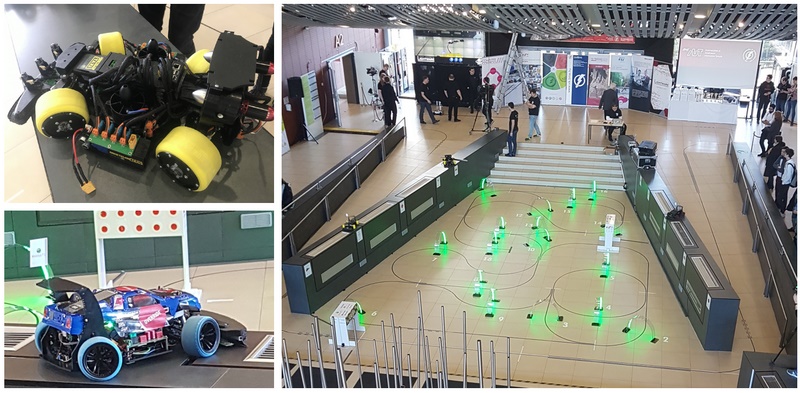
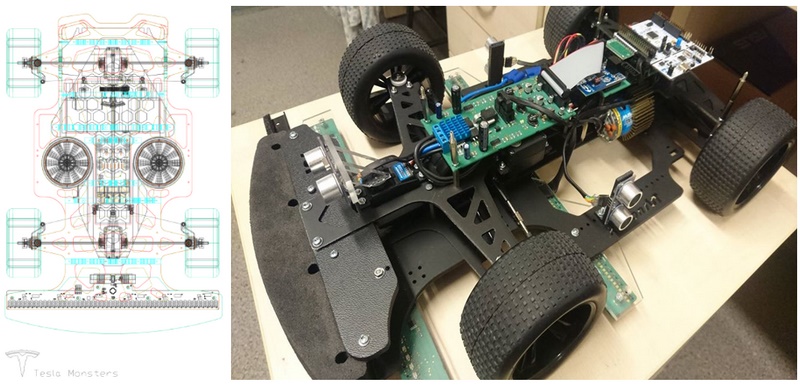
 RobonAUT – Autonóm robotok versenye 2020
RobonAUT – Autonóm robotok versenye 2020
![]() Fejlesztők délutánja – látogatás a KUKA Hungária Kft. R&D központjában
Fejlesztők délutánja – látogatás a KUKA Hungária Kft. R&D központjában
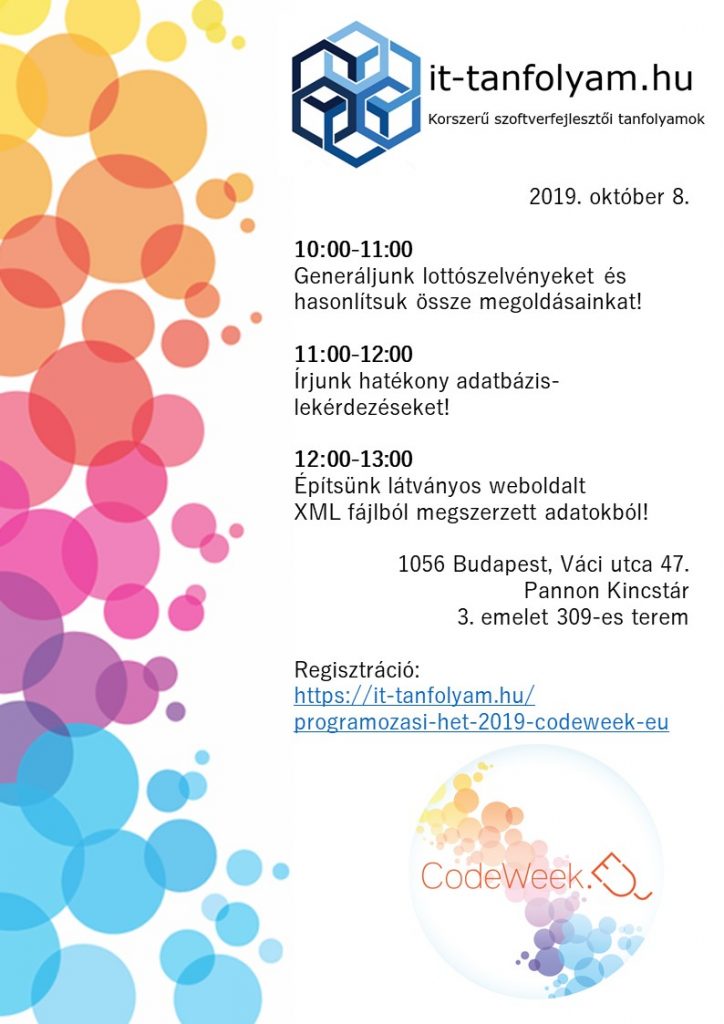
![]() Programozási Hét 2019 – CodeWeek.eu
Programozási Hét 2019 – CodeWeek.eu
![]() Múzeumok Éjszakája 2019 - Budapest ostroma 1944-45 kiállítás, Goldberger Textilipari Gyűjtemény
Múzeumok Éjszakája 2019 - Budapest ostroma 1944-45 kiállítás, Goldberger Textilipari Gyűjtemény
 FIRST® LEGO® League robot verseny 2018
FIRST® LEGO® League robot verseny 2018
![]() Programozási Hét 2018 – CodeWeek.eu
Programozási Hét 2018 – CodeWeek.eu
![]() HWSW – Szeptemberi dupla – Android/Kotlin és full-stack JavaScript fejlesztői meetup
HWSW – Szeptemberi dupla – Android/Kotlin és full-stack JavaScript fejlesztői meetup
![]() HWSW – Nyári napfordulós Android/Kotlin meetup
HWSW – Nyári napfordulós Android/Kotlin meetup
![]() Programozási Hét 2017 – CodeWeek.eu
Programozási Hét 2017 – CodeWeek.eu
133 db hozzá kapcsolódó címke:
2017 (24), 2018 (24), 2019 (24), 2020 (24), 2021 (24), 2022 (24), 2023 (24), 2024 (8), adatbázis (25), algoritmus (31), állásinterjú (10), álláskeresés (17), Android (4), animáció (17), bankjegytervezés (1), bélyegnyomtatás (1), bélyegtervezés (1), brute force (7), CodeWeek.eu (7), csoportmunka (10), digitális élményközpont (3), Digitális Témahét (8), Edutus Egyetem (1), élményalapú tanulás (21), előadás műhely-napon (24), elosztott alkalmazás (14), értékelési szempont (6), érzékelés (3), Euler (3), fájlkezelés (29), fejtörő (11), fizika (7), funkcionális programozás (18), gamifikáció (33), Google Charts (5), grafika (25), grafikus felhasználói felület (40), hálózatkezelés (14), hatékonyság (28), hierarchikus lekérdezés (7), HWSW (4), ipar 4.0 (6), ipar 5.0 (2), Jacquard szövőgép (1), játék (9), Java forráskód (63), Java verziók (4), JavaScript (6), JFreeChart (7), JSON (4), JSP (3), JTable (7), JTree (6), kapitány (3), karrier (17), karrierváltás (14), kiállítás (5), kliens-szerver (7), kliensprogram (13), kódolás/dekódolás (6), Kódolás órája (1), kollekció (32), kórház (1), KUKA (1), Kutatók éjszakája (8), LEGO (3), lekérdezés (18), logikai feladat (21), logisztika (5), lottószelvény (10), matematika (30), mesterséges intelligencia (12), mobil robot (2), munkaerőpiac (14), munkahelyi elvárás (5), múzeum (6), Múzeumok Éjszakája (2), MVC (12), Naprendszer (5), nyári tábor (2), nyomdatechnika (1), Óbudai Egyetem (2), ÓE (2), okos gyár (5), objektumorientált programozás (85), Oracle HR séma (12), orientáló modul (39), öröklődés (16), osztálydiagram (7), pályaorientáció (28), pályázat (6), ProgCont API (3), programozás (106), Programozási Hét (7), programozási tételek (28), projektmunka (5), Python (4), rajzolás (15), rendezvény 2017 (5), rendezvény 2018 (10), rendezvény 2019 (11), rendezvény 2020 (12), rendezvény 2021 (6), rendezvény 2022 (8), rendezvény 2023 (9), rendezvény 2024 (1), RMI (3), robot verseny (2), robotika (12), robotprogramozás (11), sikerszakma (3), soft skill (11), swing (26), szakmai előadás (31), szakmai modul (96), szimuláció (10), tananyagfejlesztés (8), tankocka (15), távbeszélő készülék (2), térinformatika (4), tervezés (41), tesztelés (21), tipikus munkanap (6), titkosítás/visszafejtés (4), többféle megoldás összehasonlítása (37), tömegvonzás (5), továbbfejlesztés (23), transzformáció (8), UML (8), versenybíró (1), virtuális valóság (5), visszajelzés (5), XML (8)
 A
A