
Címke: gamifikáció
33 blog bejegyzésnél szerepel:
![]() Kódolás órája az Óbudai Egyetemen 2023
Kódolás órája az Óbudai Egyetemen 2023
 Beszámoló: it-tanfolyam.hu STEM nyári tábor 2023
Beszámoló: it-tanfolyam.hu STEM nyári tábor 2023
![]() Tankocka – Legyen Ön is milliomos! – Programozás Java nyelven
Tankocka – Legyen Ön is milliomos! – Programozás Java nyelven
![]() Tankocka – Csoportba rendezés: adatbázis-kezelés, fájlkezelés, hálózatkezelés
Tankocka – Csoportba rendezés: adatbázis-kezelés, fájlkezelés, hálózatkezelés
![]() Tankocka – Rövid válasz: Java konstansok
Tankocka – Rövid válasz: Java konstansok
![]() Programozási Hét 2022 – CodeWeek.eu
Programozási Hét 2022 – CodeWeek.eu
![]() Tankocka – Szókereső: rendezési algoritmusok
Tankocka – Szókereső: rendezési algoritmusok
![]() Tankocka – Keresztrejtvény: programozási tételek
Tankocka – Keresztrejtvény: programozási tételek
![]() Tankocka – Egyszerű sorbarendezés: Java forráskód
Tankocka – Egyszerű sorbarendezés: Java forráskód
![]() Tankocka – Párkereső: csomag, osztály, interfész
Tankocka – Párkereső: csomag, osztály, interfész
![]() Tankocka – Hiányos szöveg: objektumorientált programozás
Tankocka – Hiányos szöveg: objektumorientált programozás
![]() Tankocka – Hang/Film felirattal: a barátkozás algoritmusa Dr. Sheldon Cooper szerint
Tankocka – Hang/Film felirattal: a barátkozás algoritmusa Dr. Sheldon Cooper szerint
![]() Tankocka – Idővonal: Java verziók újdonságai
Tankocka – Idővonal: Java verziók újdonságai
![]() Tankocka – Hozzárendeléses táblázat: Java kollekciók
Tankocka – Hozzárendeléses táblázat: Java kollekciók
![]() Tankocka – Párosítós játék: Programozás Java nyelven
Tankocka – Párosítós játék: Programozás Java nyelven
![]() Programozási Hét 2021 – CodeWeek.eu
Programozási Hét 2021 – CodeWeek.eu
![]() LEGO Education módszertani képzés / Robotika Mindstorms EV3 robottal
LEGO Education módszertani képzés / Robotika Mindstorms EV3 robottal
 Dr. Sheldon Cooper szólánc játéka
Dr. Sheldon Cooper szólánc játéka







162 db hozzá kapcsolódó címke:
2017 (24), 2018 (24), 2019 (24), 2020 (24), 2021 (24), 2022 (24), 2023 (24), adatbázis (25), Agymenők (3), algoritmus (31), álláskeresés (17), animáció (17), ASCII (6), atipikus megoldás (5), becslés (6), brute force (7), ChatGPT (1), ciklusok (18), CodeWeek.eu (7), csoportmunka (10), dátumkezelés (10), Edutus Egyetem (1), élményalapú tanulás (21), előadás műhely-napon (24), elosztott alkalmazás (14), érettségi feladat (8), érzékelés (3), évforduló (24), fájlkezelés (29), fejtörő (11), felvételi feladat (4), Fibonacci (3), fizika (7), fraktál (1), funkcionális programozás (18), GitHub (2), Google Cloud Platform (2), grafika (26), grafikus felhasználói felület (40), hálózatkezelés (14), hatékonyság (28), humor (4), időzítő (4), IEEE Spectrum (2), Indeed (2), ingyenes esemény (34), ipar 4.0 (6), ipar 5.0 (2), IT történet (20), játék (9), Java forráskód (63), Java verziók (4), JavaFX (3), JavaScript (6), JFreeChart (7), JSP (3), JTable (7), JTree (6), kapitány (3), karrier (17), karrierváltás (14), keresztrejtvény (2), kiállítás (6), kígyókocka (2), kivételkezelés (13), kliens-szerver (7), kliensprogram (13), Koch-görbe (1), Kódolás órája (1), kollekció (32), konferencia (15), kriptoaritmetika (2), Kutatók éjszakája (8), LEGO (3), lépésszám (9), logikai feladat (21), logisztika (5), lottószelvény (10), matematika érettségi feladat (8), matematika (30), mém (7), mesterséges intelligencia (12), metódus (30), MMO (6), Multimédia az oktatásban konferencia (6), munkaerőpiac (14), munkahelyi elvárás (5), múzeum (7), MVC (12), Naprendszer (5), naptár (26), NASA (2), Neumann János Számítógép-tudományi Társaság (8), NJSZT Multimédia az oktatásban (6), NJSZT (8), nyári tábor (2), Óbudai Egyetem (2), ÓE (2), okos gyár (5), objektumorientált programozás (85), OpenWeatherMap (2), optikai csalódás (2), orientáló modul (39), öröklődés (16), összefoglalás (2), pályaorientáció (28), pályázat (6), ProgCont API (3), programozás (106), Programozási Hét (7), programozási tételek (28), projektmunka (5), protokoll (számítógép-hálózat) (3), publikáció (9), PYPL (2), Python (4), rajzolás (15), Reddit (2), rekurzió (9), rendezvény 2018 (10), rendezvény 2020 (12), rendezvény 2021 (6), rendezvény 2022 (8), rendezvény 2023 (10), robot verseny (2), robotika (12), robotprogramozás (11), sikerszakma (3), soft skill (10), Stack Overflow (2), statisztika (11), STEM (3), Stream API (14), swing (26), szakmai előadás (31), szakmai modul (96), szálkezelés (4), szimuláció (10), sztereogram (1), tananyagfejlesztés (8), tankocka (15), tervezés (41), tesztelés (21), tévésorozat (3), TIOBE (2), tipikus munkanap (6), többféle megoldás összehasonlítása (37), tömb (17), tömegvonzás (5), továbbfejlesztés (23), továbbképzés (4), transzformáció (8), Trendy Skills (2), UML (8), Unity (2), ünnepnap (13), vélemény (4), versenybíró (1), videó (5), virtuális valóság (5), visszajelzés (5), XML (8)



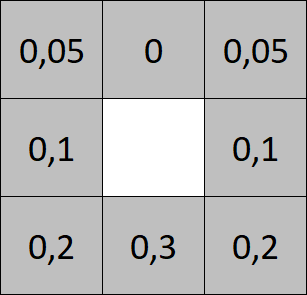
 Dr. Sheldon Cooper karakterét nem kell bemutatni. Az Agymenők (The Big Bang Theory) című sorozat 2. évad 5. epizódjának címe A vitatkozás nagymestere (The Euclid Alternative). Nagyon találó az epizód címe magyarul. Miközben Penny reggel Sheldont munkába viszi, Sheldon az autóban kémiai elemek nevéből álló szólánc játékával különösen Penny agyára megy (pedig a játékot Penny nyeri ?):
Dr. Sheldon Cooper karakterét nem kell bemutatni. Az Agymenők (The Big Bang Theory) című sorozat 2. évad 5. epizódjának címe A vitatkozás nagymestere (The Euclid Alternative). Nagyon találó az epizód címe magyarul. Miközben Penny reggel Sheldont munkába viszi, Sheldon az autóban kémiai elemek nevéből álló szólánc játékával különösen Penny agyára megy (pedig a játékot Penny nyeri ?):

 A Nemzetközi LEGO® Robot versenyek azért jöttek létre, hogy a segítsék/erősítsék a műszaki, természettudományos és informatikai kompetenciák fejlesztésén túl a kooperatív csoportmunkát, a problémamegoldásra orientáló komplex gondolkodásmódot. A hazai oktatási rendszerben ezek az összetevők is egyre hangsúlyosabban jelennek meg. A Magyarországon is „játszható” nemzetközi versenyek közül kiemelkedik két verseny: a
A Nemzetközi LEGO® Robot versenyek azért jöttek létre, hogy a segítsék/erősítsék a műszaki, természettudományos és informatikai kompetenciák fejlesztésén túl a kooperatív csoportmunkát, a problémamegoldásra orientáló komplex gondolkodásmódot. A hazai oktatási rendszerben ezek az összetevők is egyre hangsúlyosabban jelennek meg. A Magyarországon is „játszható” nemzetközi versenyek közül kiemelkedik két verseny: a 




